

Warum der Standort diese Lösung braucht
Eine 3D-Vision-Roboterzelle für Be- und Entladung hat meist vorhandene Taktzeiten, Vorrichtungen, Bedienabläufe und Qualitätsregeln. Vor dem Einsatz von 3D-Vision-Roboterführung für Be- und Entladung muss geklärt werden, welche Fehler sofort sperren, welche Fälle geprüft werden und welche Daten zum Los gehören.
Bildqualität bedeutet nicht nur Helligkeit. Reflektierende, transparente und sehr kleine Merkmale brauchen jeweils eine passende Lichtstrategie.
Daten müssen erklären, warum ein Teil bewertet wurde. Bild, Rezept, Modellversion, Trigger, Prüfer und Aktion bilden die Nachweiskette.
Prüfobjekt und Bildgrenze
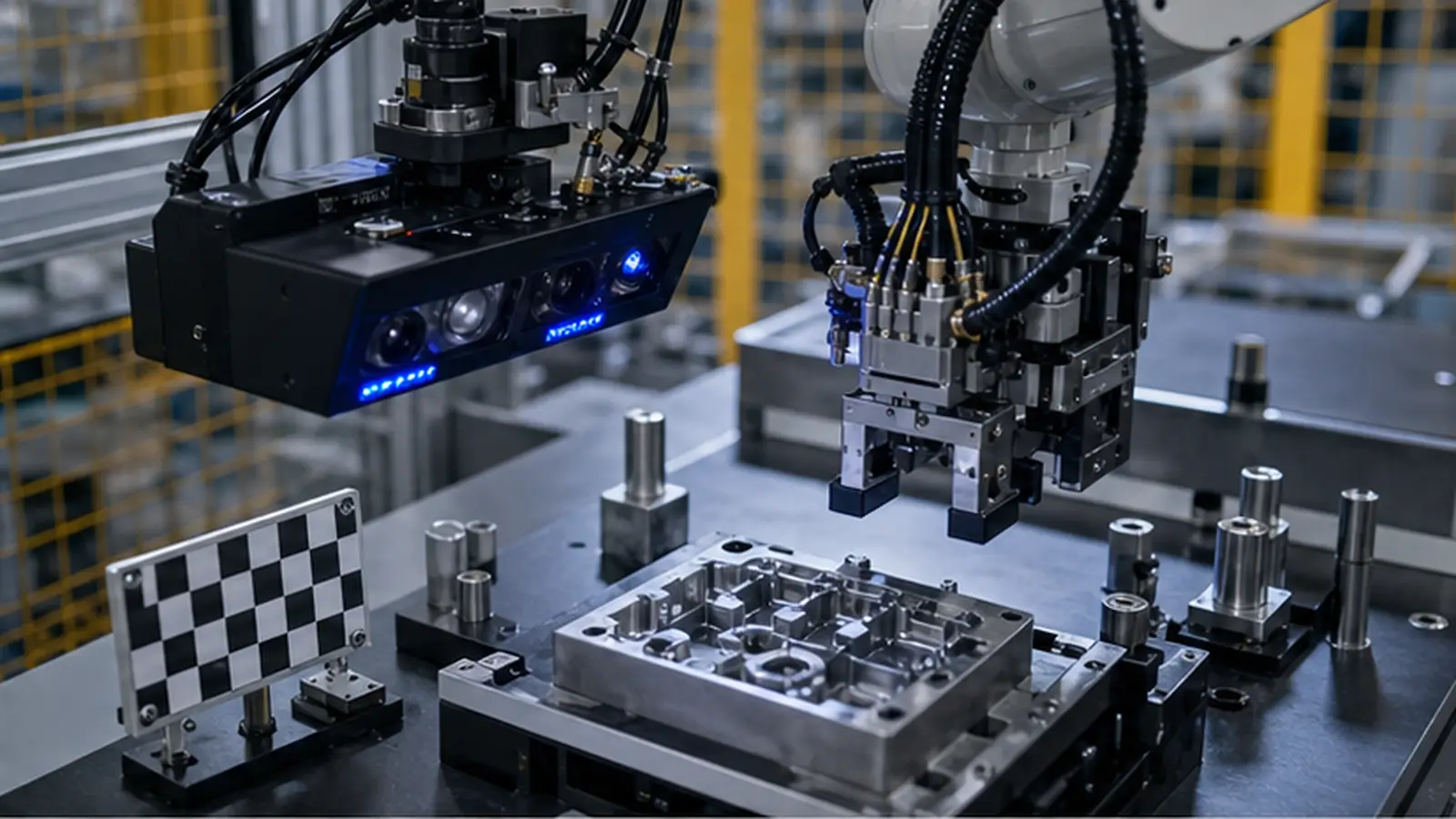
3D-Vision-Roboterführung für Be- und Entladung wird durch Material, Reflexion, Transparenz, Lage und Eingangsstreuung beeinflusst. Sichtfeld, Linse, Licht, Belichtung, Trigger und Vorrichtung müssen gemeinsam ausgelegt werden.
Daten müssen erklären, warum ein Teil bewertet wurde. Bild, Rezept, Modellversion, Trigger, Prüfer und Aktion bilden die Nachweiskette.
Produktionsstabilität ist wichtiger als visuelle Effekte. Rezeptfreigabe, Modellwechsel, Musteränderung und Ausnahmelauf brauchen Protokolle.
Optik, Mechanik und Taktzeit
Stabilität entsteht durch viele kleine kontrollierte Variablen. Fördergeschwindigkeit, Positionierung, Codelesung, Lichtalterung, Kamerahalterung, Vibration und Umgebungslicht müssen bei realer Geschwindigkeit getestet werden.
Produktionsstabilität ist wichtiger als visuelle Effekte. Rezeptfreigabe, Modellwechsel, Musteränderung und Ausnahmelauf brauchen Protokolle.
Bei Nachrüstungen zählen Bauraum, Kabelschutz, Schaltschrankwärme, Sicherheitstüren, Ausschleusung und Stopp-Logik.
Algorithmen folgen dem Prozessstandard
Modelle und Schwellenwerte müssen dem Prozessstandard dienen. Für Grenzmuster, Fehlrückweisungen, mögliche Übersehfehler und Rezeptfreigaben braucht der Standort klare Regeln.
Bei Nachrüstungen zählen Bauraum, Kabelschutz, Schaltschrankwärme, Sicherheitstüren, Ausschleusung und Stopp-Logik.
Wartung prüft Lichtalterung, Linsenverschmutzung, Vorrichtungsverschleiß, Kameraversatz, Speicherplatz, Musterdrift und Rechte.
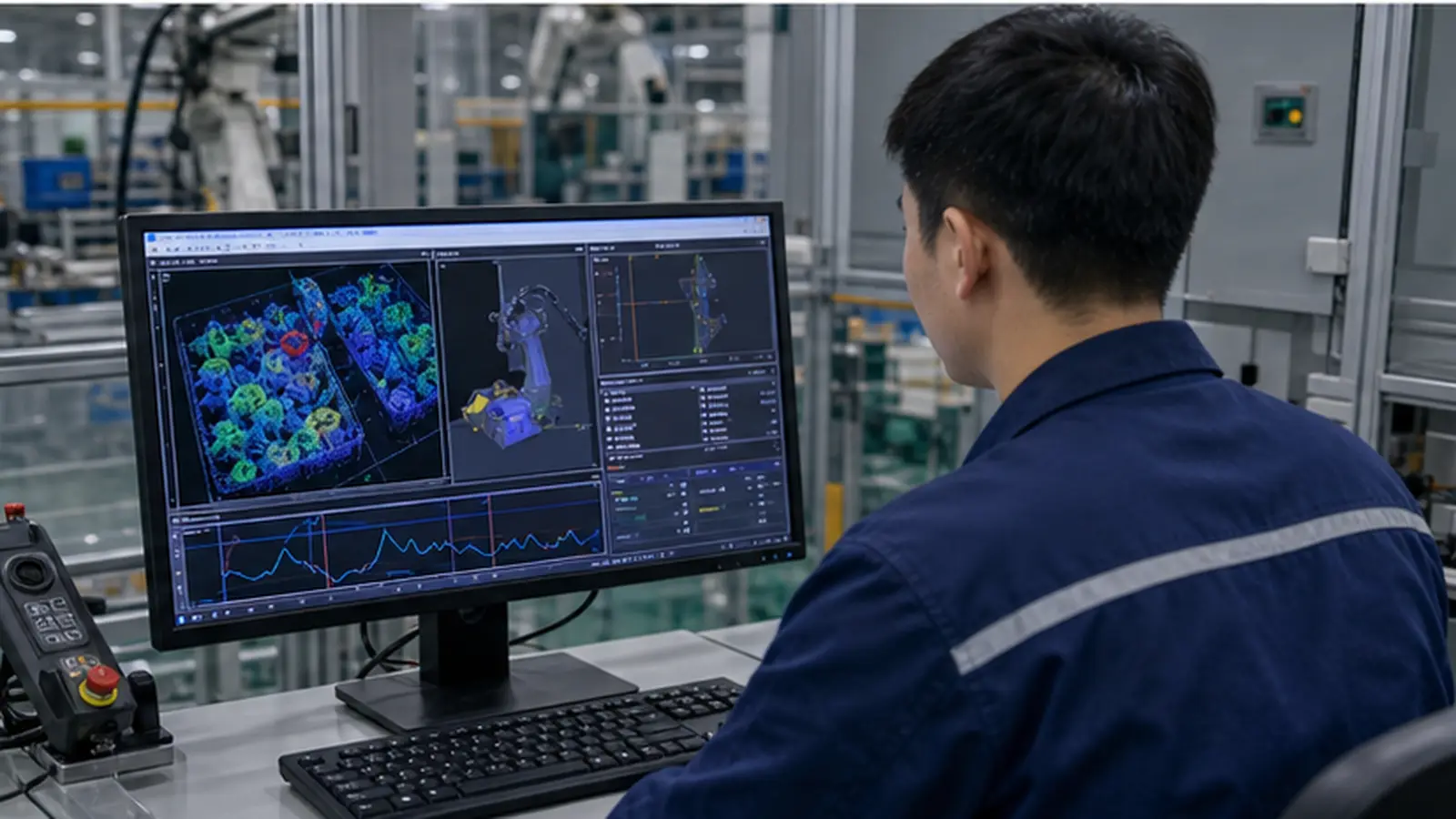
Linienkopplung und lokale Aufzeichnung
Eine 3D-Vision-Roboterzelle für Be- und Entladung benötigt mehr als OK/NG. Auftrag, Los, Rezept, Bild, Ergebnis, Prüfurteil und Ausnahmezustand sollten lokal gespeichert werden, damit die Linie auch ohne Netzwerk weiter dokumentiert.
Wartung prüft Lichtalterung, Linsenverschmutzung, Vorrichtungsverschleiß, Kameraversatz, Speicherplatz, Musterdrift und Rechte.
Standortbedingungen sind oft wichtiger als die Komplexität des Algorithmus. Prozess, Ausrüstung, Qualität und IT sollten die Grenze gemeinsam prüfen.
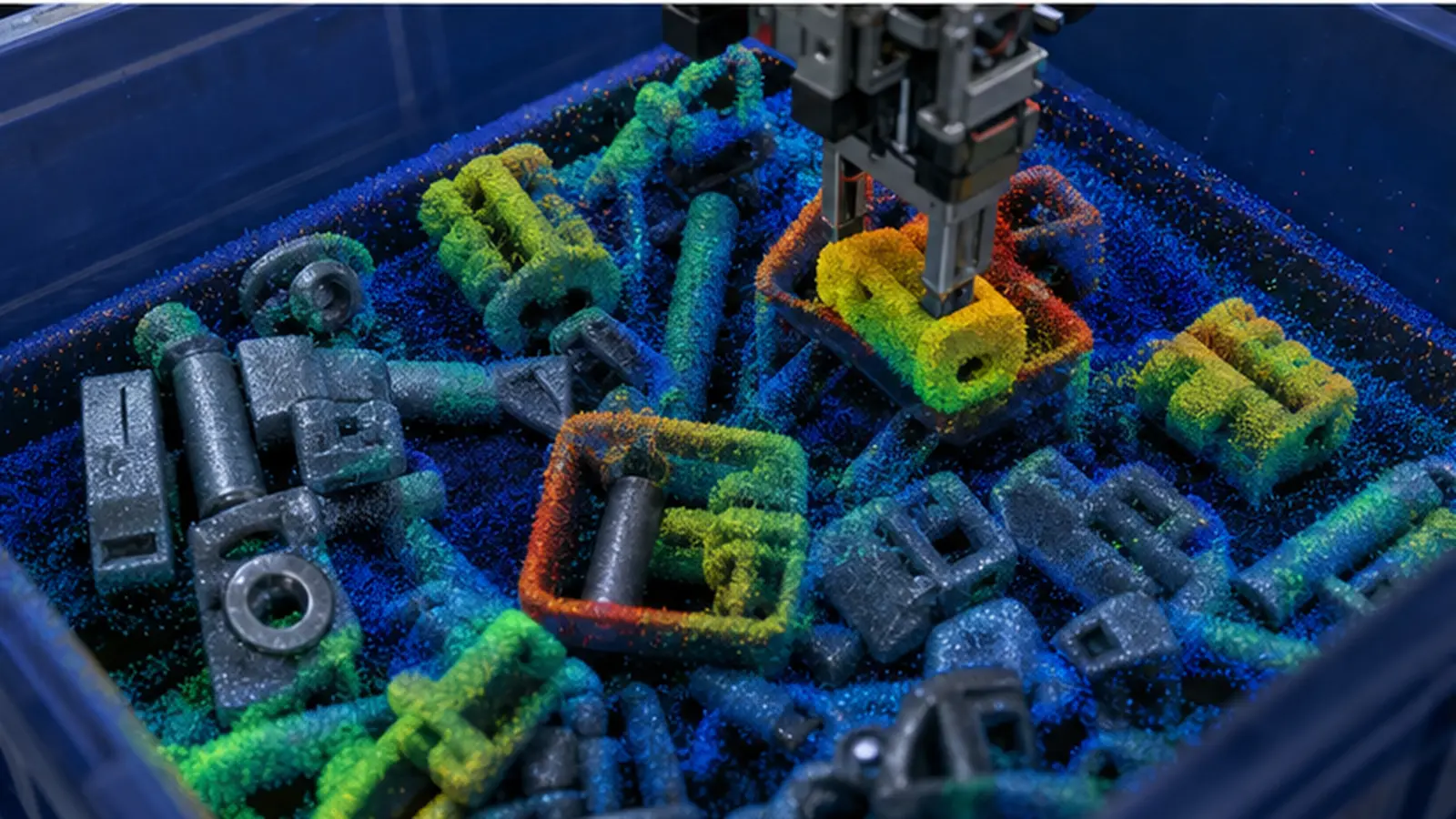
Musterbibliothek und Ausnahmebehandlung
Die Musterbibliothek trägt die Langzeitstabilität von 3D-Vision-Roboterführung für Be- und Entladung. Sie umfasst gute Teile, typische Fehler, Grenzmuster und gute Teile mit Verwechslungsrisiko.
Standortbedingungen sind oft wichtiger als die Komplexität des Algorithmus. Prozess, Ausrüstung, Qualität und IT sollten die Grenze gemeinsam prüfen.
Bildqualität bedeutet nicht nur Helligkeit. Reflektierende, transparente und sehr kleine Merkmale brauchen jeweils eine passende Lichtstrategie.
Abnahme, Schulung und Wartung
Die Abnahme sollte Dauerlauf, Geschwindigkeit, Umrüstung, Fehlerwiederanlauf, Rechte, Export, Bildspeicherung und Wartungsübergabe abdecken.
Bildqualität bedeutet nicht nur Helligkeit. Reflektierende, transparente und sehr kleine Merkmale brauchen jeweils eine passende Lichtstrategie.
Daten müssen erklären, warum ein Teil bewertet wurde. Bild, Rezept, Modellversion, Trigger, Prüfer und Aktion bilden die Nachweiskette.
Prüfpunkte vor der Übertragung
Bei der Übertragung auf eine weitere 3D-Vision-Roboterzelle für Be- und Entladung müssen Platz, Teilezustand, Vorrichtungsunterschiede, Taktreserve und Datenschnittstellen erneut geprüft werden.
Daten müssen erklären, warum ein Teil bewertet wurde. Bild, Rezept, Modellversion, Trigger, Prüfer und Aktion bilden die Nachweiskette.
Produktionsstabilität ist wichtiger als visuelle Effekte. Rezeptfreigabe, Modellwechsel, Musteränderung und Ausnahmelauf brauchen Protokolle.