

Dlaczego zakład potrzebuje rozwiązania
komórki robota z prowadzeniem 3D vision do załadunku i odbioru ma już tempo, oprzyrządowanie i reguły jakości. Przed oceną System prowadzenia robota 3D vision do załadunku i odbioru trzeba ustalić wady blokujące, przypadki przeglądu i dane partii.
Jakość obrazu to nie tylko ostrość. Odbicia, przezroczystość, drobne rysy i pomiary wymagają innej optyki.
Dane wyjaśniają decyzję: obraz, receptura, model, trigger, recenzent i akcja tworzą dowód.
Obiekt kontroli i granica obrazu
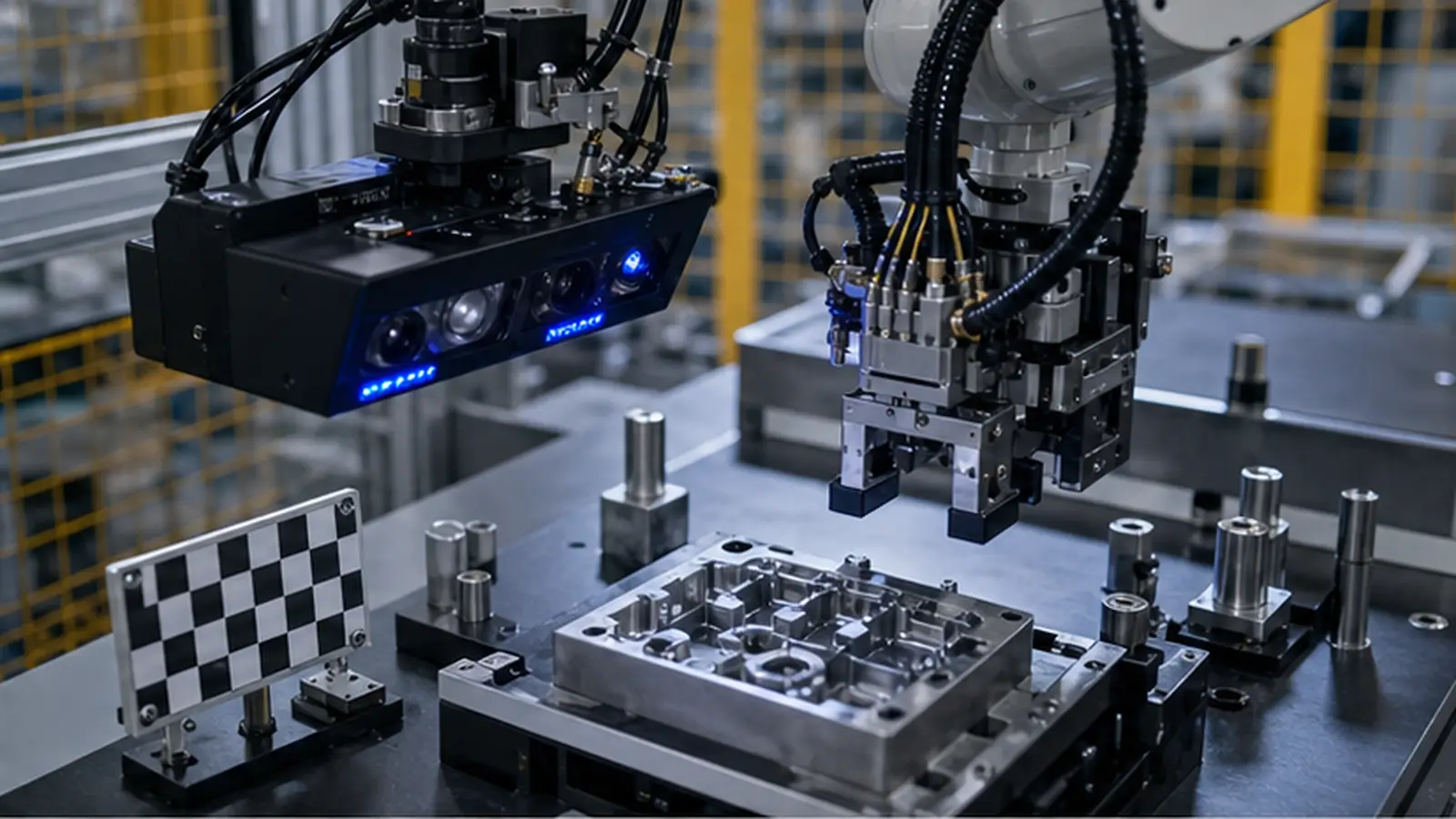
System prowadzenia robota 3D vision do załadunku i odbioru zależy od materiału, odbić, przezroczystości, pozycji i zmienności. Pole widzenia, obiektyw, światło, ekspozycja, wyzwalanie i powtarzalność projektuje się razem.
Dane wyjaśniają decyzję: obraz, receptura, model, trigger, recenzent i akcja tworzą dowód.
Stabilność produkcji jest kluczowa. Receptury, modele, próbki i wyjątki muszą mieć historię.
Optyka, mechanika i takt
Stabilność wymaga testu prędkości, pozycjonowania, odczytu, starzenia światła, mocowania kamery, drgań i światła otoczenia w realnym takcie.
Stabilność produkcji jest kluczowa. Receptury, modele, próbki i wyjątki muszą mieć historię.
W modernizacji liczą się miejsce, kable, ciepło szafy, bezpieczeństwo, odrzut i stop.
Algorytm zgodny z procesem
Model i progi służą standardowi procesu. Próbki graniczne, fałszywe odrzuty, ryzyko przeoczenia i receptury potrzebują jasnych reguł.
W modernizacji liczą się miejsce, kable, ciepło szafy, bezpieczeństwo, odrzut i stop.
Utrzymanie kontroluje światło, obiektyw, zużycie, kamerę, dysk, dryf próbek i prawa.
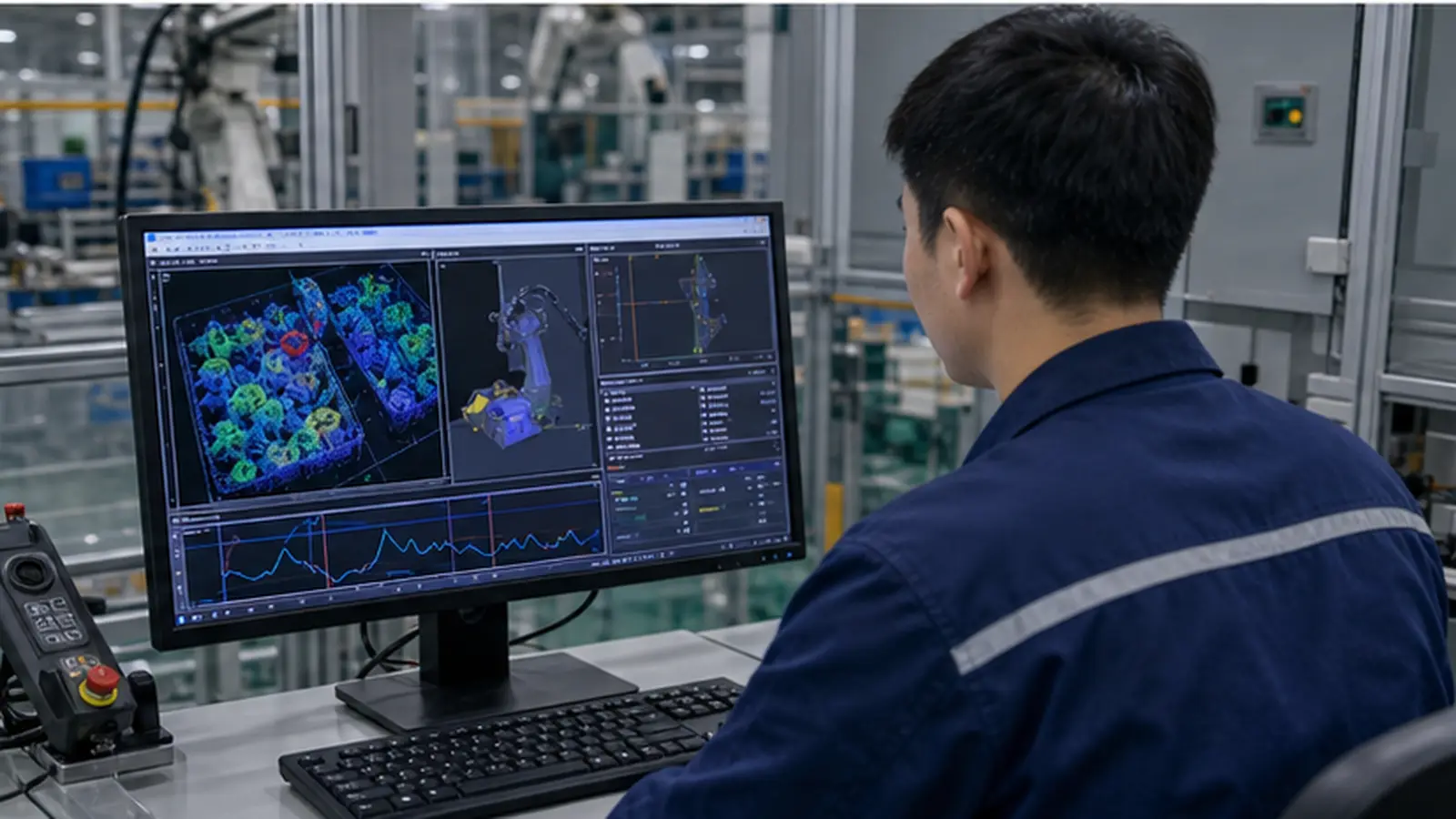
Integracja i dane lokalne
komórki robota z prowadzeniem 3D vision do załadunku i odbioru wymaga więcej niż OK/NG. Zlecenie, partia, receptura, obraz, wynik, decyzja i wyjątek powinny być zapisane lokalnie.
Utrzymanie kontroluje światło, obiektyw, zużycie, kamerę, dysk, dryf próbek i prawa.
Ograniczenia zakładu bywają ważniejsze niż złożoność algorytmu; proces, sprzęt, jakość i IT sprawdzają granice razem.
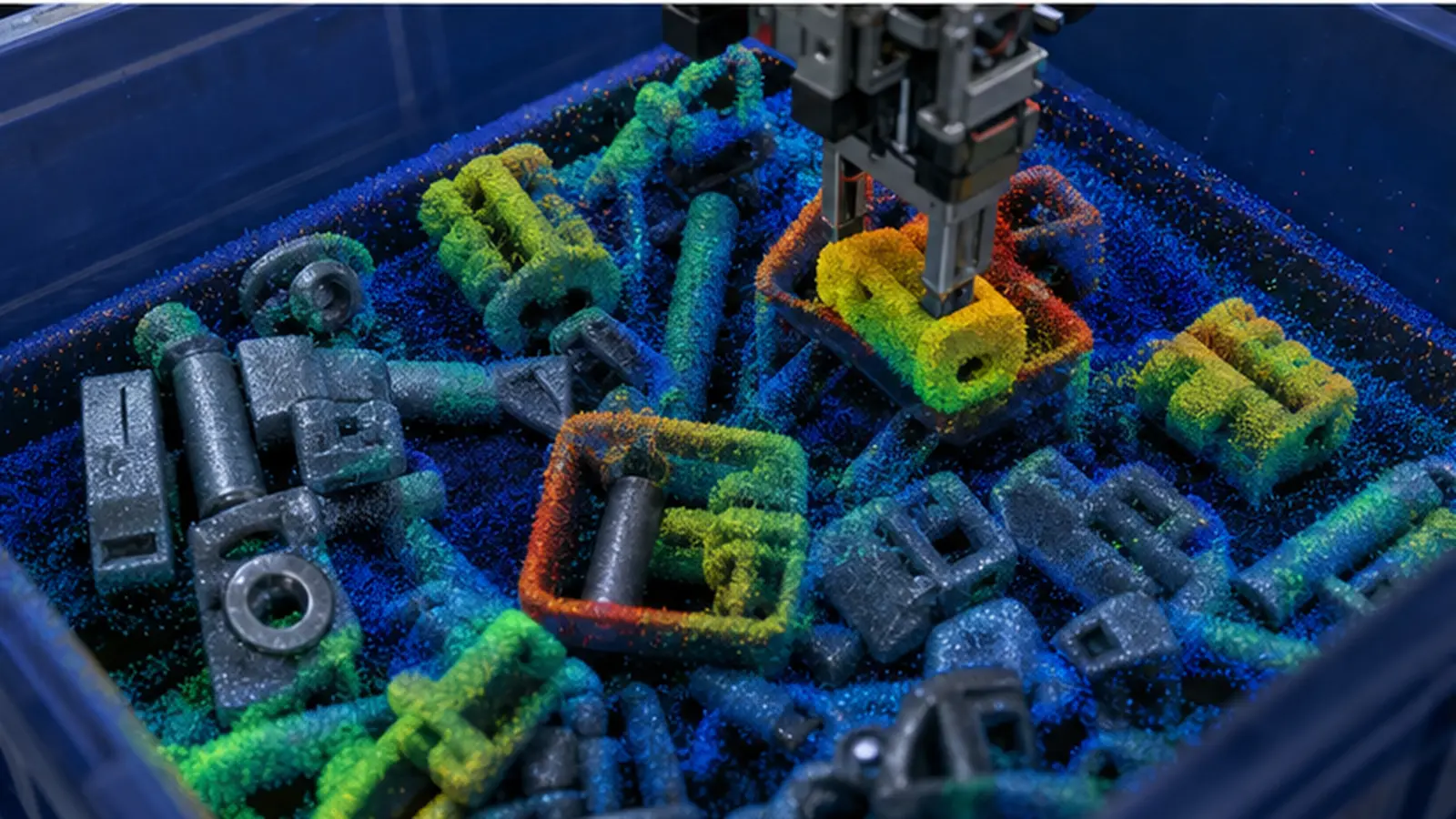
Biblioteka próbek i wyjątki
Biblioteka próbek wspiera System prowadzenia robota 3D vision do załadunku i odbioru: dobre części, typowe defekty, granice i dobre wyroby łatwe do błędnego odrzutu.
Ograniczenia zakładu bywają ważniejsze niż złożoność algorytmu; proces, sprzęt, jakość i IT sprawdzają granice razem.
Jakość obrazu to nie tylko ostrość. Odbicia, przezroczystość, drobne rysy i pomiary wymagają innej optyki.
Odbiór, szkolenie i utrzymanie
Odbiór obejmuje ciągłą pracę, szybkość, przezbrojenie, odzysk, uprawnienia, eksport, obrazy i przekazanie utrzymania.
Jakość obrazu to nie tylko ostrość. Odbicia, przezroczystość, drobne rysy i pomiary wymagają innej optyki.
Dane wyjaśniają decyzję: obraz, receptura, model, trigger, recenzent i akcja tworzą dowód.
Kontrola przed powieleniem
Przed wdrożeniem na inną komórki robota z prowadzeniem 3D vision do załadunku i odbioru sprawdza się przestrzeń, części, oprzyrządowanie, zapas taktu i interfejsy danych.
Dane wyjaśniają decyzję: obraz, receptura, model, trigger, recenzent i akcja tworzą dowód.
Stabilność produkcji jest kluczowa. Receptury, modele, próbki i wyjątki muszą mieć historię.