

Vì sao hiện trường cần giải pháp này
cell robot dẫn hướng 3D vision cho cấp và lấy phôi đã có nhịp sản xuất, đồ gá và quy định chất lượng. Trước khi đánh giá Hệ thống dẫn hướng robot 3D vision cho cấp và lấy phôi, cần xác định lỗi phải chặn, trường hợp cần rà soát và dữ liệu theo lô.
Chất lượng ảnh không chỉ là sắc nét. Phản xạ, trong suốt, vết xước nhỏ và đo kích thước cần quang học khác nhau.
Dữ liệu phải giải thích từng phán đoán: ảnh, công thức, phiên bản mô hình, tín hiệu kích hoạt, người rà soát và hành động.
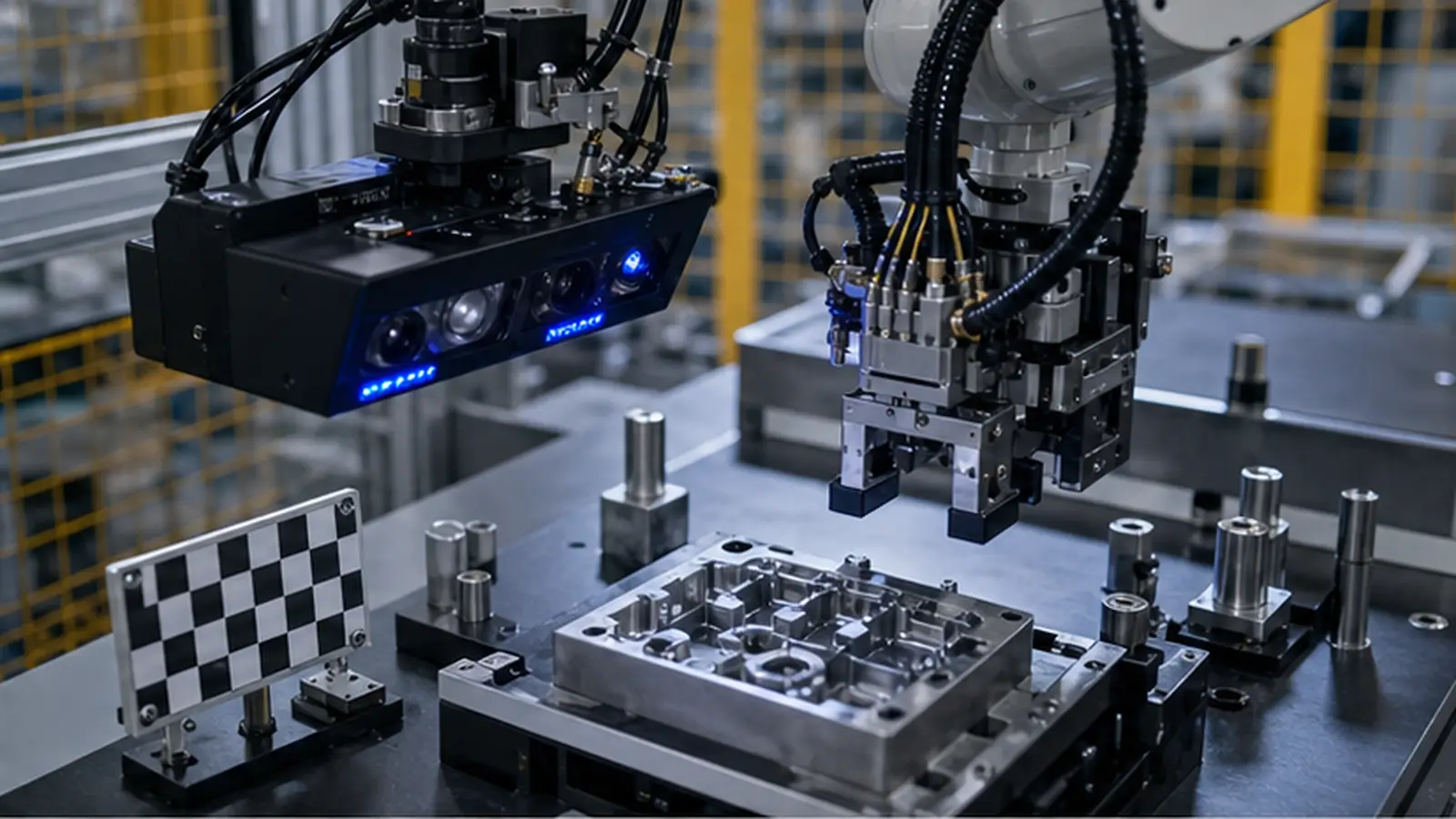
Đối tượng kiểm tra và ranh giới ảnh
Hệ thống dẫn hướng robot 3D vision cho cấp và lấy phôi bị ảnh hưởng bởi vật liệu, phản xạ, độ trong, tư thế chi tiết và dao động đầu vào. vùng nhìn, ống kính, đèn, thời gian phơi sáng, tín hiệu kích hoạt và độ lặp lại phải thiết kế cùng nhau.
Dữ liệu phải giải thích từng phán đoán: ảnh, công thức, phiên bản mô hình, tín hiệu kích hoạt, người rà soát và hành động.
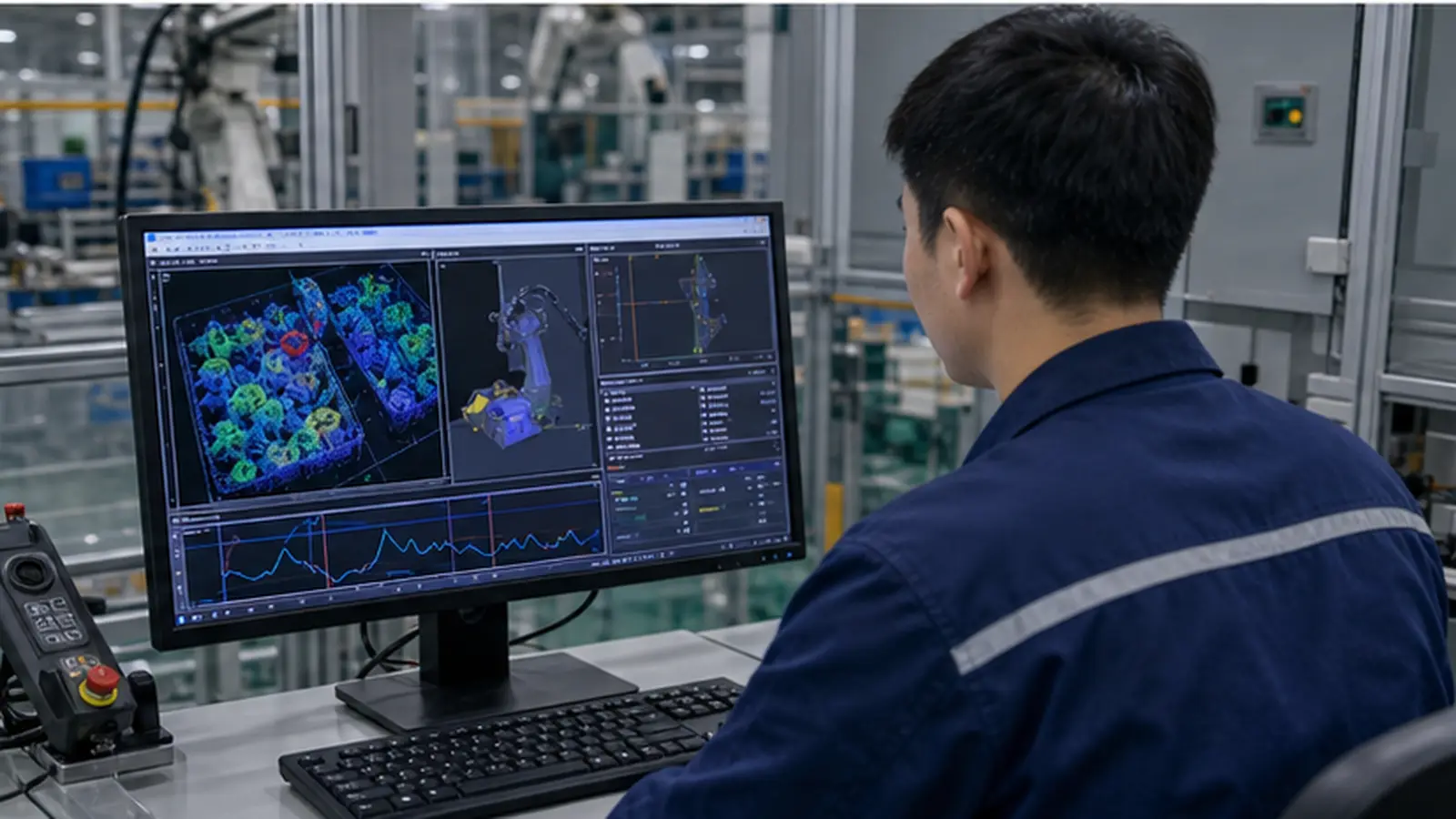
Ổn định sản xuất quan trọng hơn hình thức. công thức, mô hình, mẫu và ngoại lệ cần có lịch sử.
Quang học, cơ khí và nhịp dây chuyền
Độ ổn định cần kiểm tra tốc độ băng tải, định vị, đọc mã, tuổi thọ đèn, gá camera, rung và ánh sáng môi trường ở nhịp thật.
Ổn định sản xuất quan trọng hơn hình thức. công thức, mô hình, mẫu và ngoại lệ cần có lịch sử.
Cải tạo dây chuyền cần chú ý không gian, cáp, nhiệt tủ, an toàn, cơ cấu loại và logic dừng.
Thuật toán phải theo chuẩn quy trình
mô hình và ngưỡng phải phục vụ chuẩn quy trình. Mẫu biên, loại nhầm, rủi ro bỏ sót và phát hành công thức cần quy tắc rõ.
Cải tạo dây chuyền cần chú ý không gian, cáp, nhiệt tủ, an toàn, cơ cấu loại và logic dừng.
Bảo trì theo dõi đèn, ống kính, mòn đồ gá, lệch camera, dung lượng đĩa, trôi mẫu và quyền.
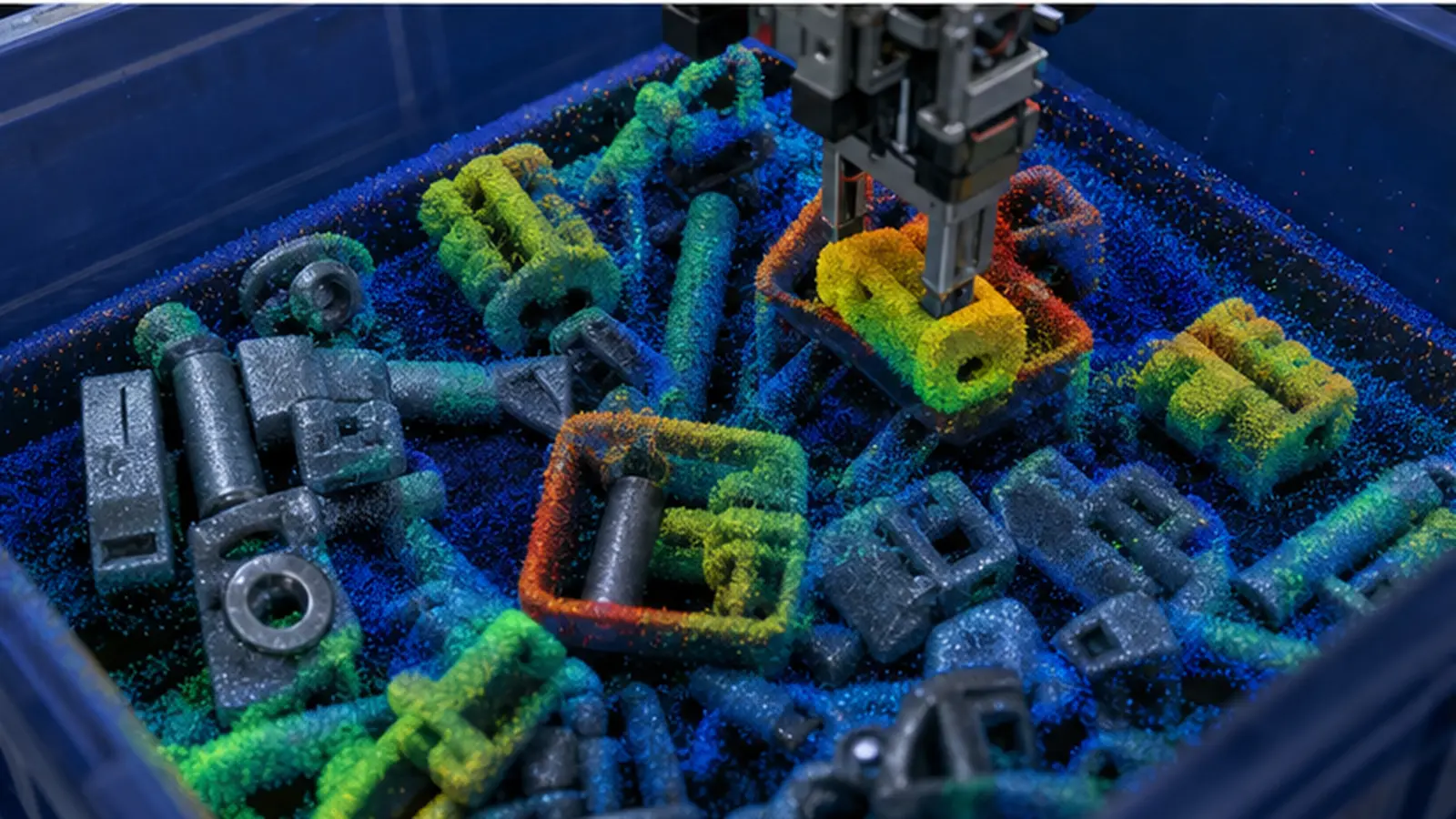
Tích hợp dây chuyền và dữ liệu cục bộ
cell robot dẫn hướng 3D vision cho cấp và lấy phôi cần nhiều hơn OK/NG. Lệnh, lô, công thức, ảnh, kết quả, rà soát và ngoại lệ phải được lưu cục bộ.
Bảo trì theo dõi đèn, ống kính, mòn đồ gá, lệch camera, dung lượng đĩa, trôi mẫu và quyền.
Ràng buộc hiện trường thường quan trọng hơn độ phức tạp thuật toán; quy trình, thiết bị, chất lượng và IT nên cùng xem xét.
Thư viện mẫu và xử lý ngoại lệ
Thư viện mẫu giúp Hệ thống dẫn hướng robot 3D vision cho cấp và lấy phôi ổn định lâu dài, gồm mẫu tốt, lỗi điển hình, mẫu biên và mẫu tốt dễ bị loại nhầm.
Ràng buộc hiện trường thường quan trọng hơn độ phức tạp thuật toán; quy trình, thiết bị, chất lượng và IT nên cùng xem xét.
Chất lượng ảnh không chỉ là sắc nét. Phản xạ, trong suốt, vết xước nhỏ và đo kích thước cần quang học khác nhau.
Nghiệm thu, đào tạo và bảo trì
Nghiệm thu bao gồm chạy liên tục, tốc độ, đổi mã, phục hồi, quyền, xuất dữ liệu, lưu ảnh và bàn giao bảo trì.
Chất lượng ảnh không chỉ là sắc nét. Phản xạ, trong suốt, vết xước nhỏ và đo kích thước cần quang học khác nhau.
Dữ liệu phải giải thích từng phán đoán: ảnh, công thức, phiên bản mô hình, tín hiệu kích hoạt, người rà soát và hành động.
Điểm cần kiểm tra trước khi nhân rộng
Khi nhân rộng sang cell robot dẫn hướng 3D vision cho cấp và lấy phôi khác, cần kiểm tra lại không gian, chi tiết đầu vào, đồ gá, dư nhịp và giao diện dữ liệu.
Dữ liệu phải giải thích từng phán đoán: ảnh, công thức, phiên bản mô hình, tín hiệu kích hoạt, người rà soát và hành động.
Ổn định sản xuất quan trọng hơn hình thức. công thức, mô hình, mẫu và ngoại lệ cần có lịch sử.