

Mengapa tapak memerlukan penyelesaian ini
sel robot berpandu 3D vision untuk loading dan unloading sudah mempunyai takt, lekapan dan peraturan kualiti. Sebelum Sistem panduan robot 3D vision untuk loading dan unloading dinilai, kecacatan blok, kes semakan dan data kelompok perlu ditentukan.
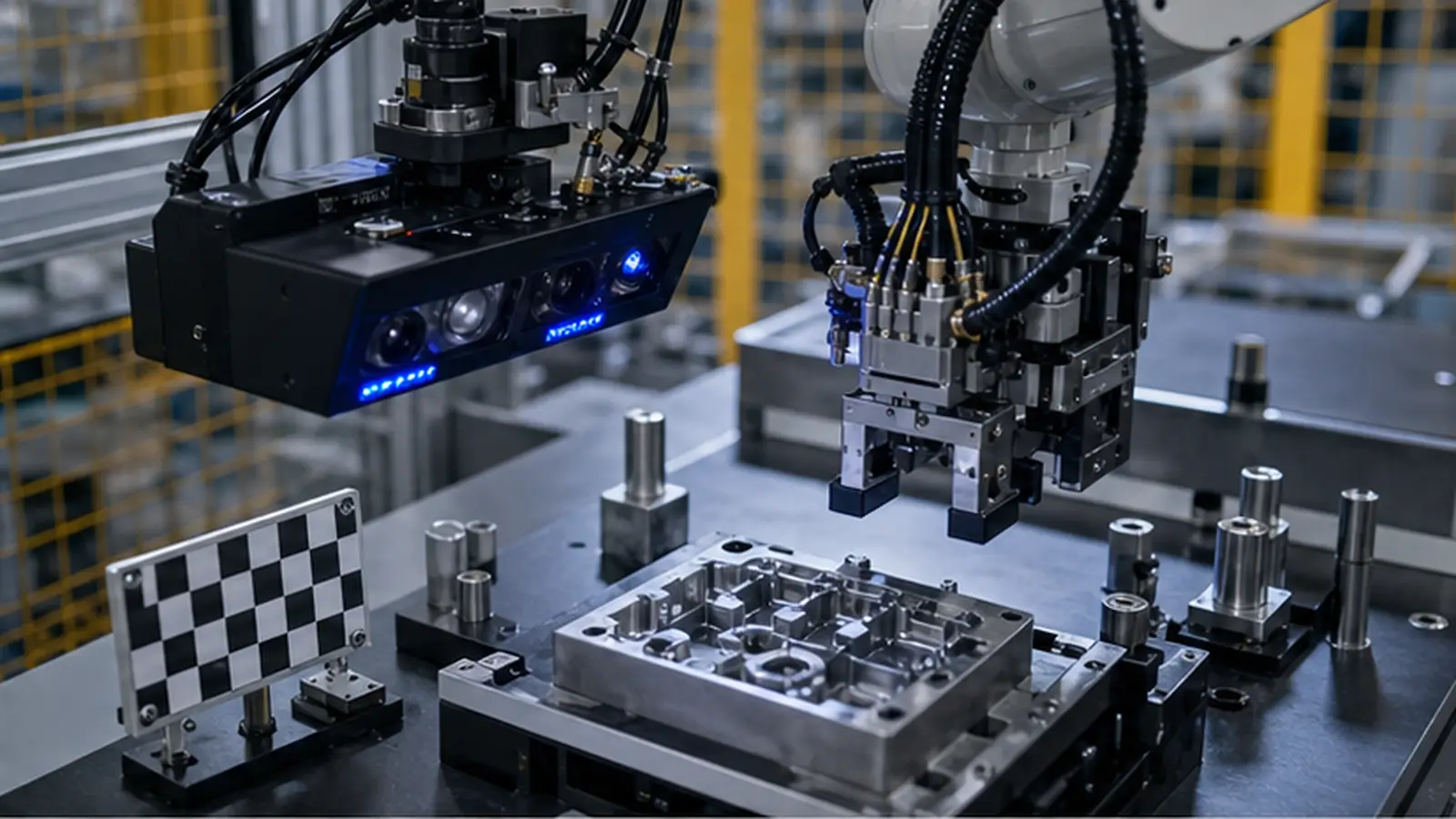
Kualiti imej bukan sekadar tajam. Refleksi, ketelusan, calar halus dan ukuran memerlukan optik berbeza.
Data menerangkan setiap keputusan: imej, resipi, versi model, pencetus, semakaner dan tindakan.
Objek pemeriksaan dan sempadan imej
Sistem panduan robot 3D vision untuk loading dan unloading dipengaruhi bahan, pantulan, ketelusan, kedudukan komponen dan variasi masuk. medan pandangan, lensaa, cahaya, dedahan, pencetus dan kebolehulangan direka bersama.
Data menerangkan setiap keputusan: imej, resipi, versi model, pencetus, semakaner dan tindakan.
Kestabilan pengeluaran paling penting. resipi, model, sampel dan exception perlu sejarah.
Optik, mekanik dan takt
Kestabilan diuji pada kelajuan sebenar: penghantar, posisi, bacaan kod, hayat lampu, pemasangan kamera, getaran dan cahaya persekitaran.
Kestabilan pengeluaran paling penting. resipi, model, sampel dan exception perlu sejarah.
Retrofit memerlukan perhatian pada ruang, kabel, haba panel, keselamatan, reject dan stop logic.
Algoritma ikut standard proses
model dan ambang perlu ikut standard proses. Sampel sempadan, tolak salah, risiko miss dan resipi release memerlukan peraturan jelas.
Retrofit memerlukan perhatian pada ruang, kabel, haba panel, keselamatan, reject dan stop logic.
Penyelenggaraan memantau lampu, lensa, lekapan wear, camera shift, disk, sampel hanyutan dan kebenaran.
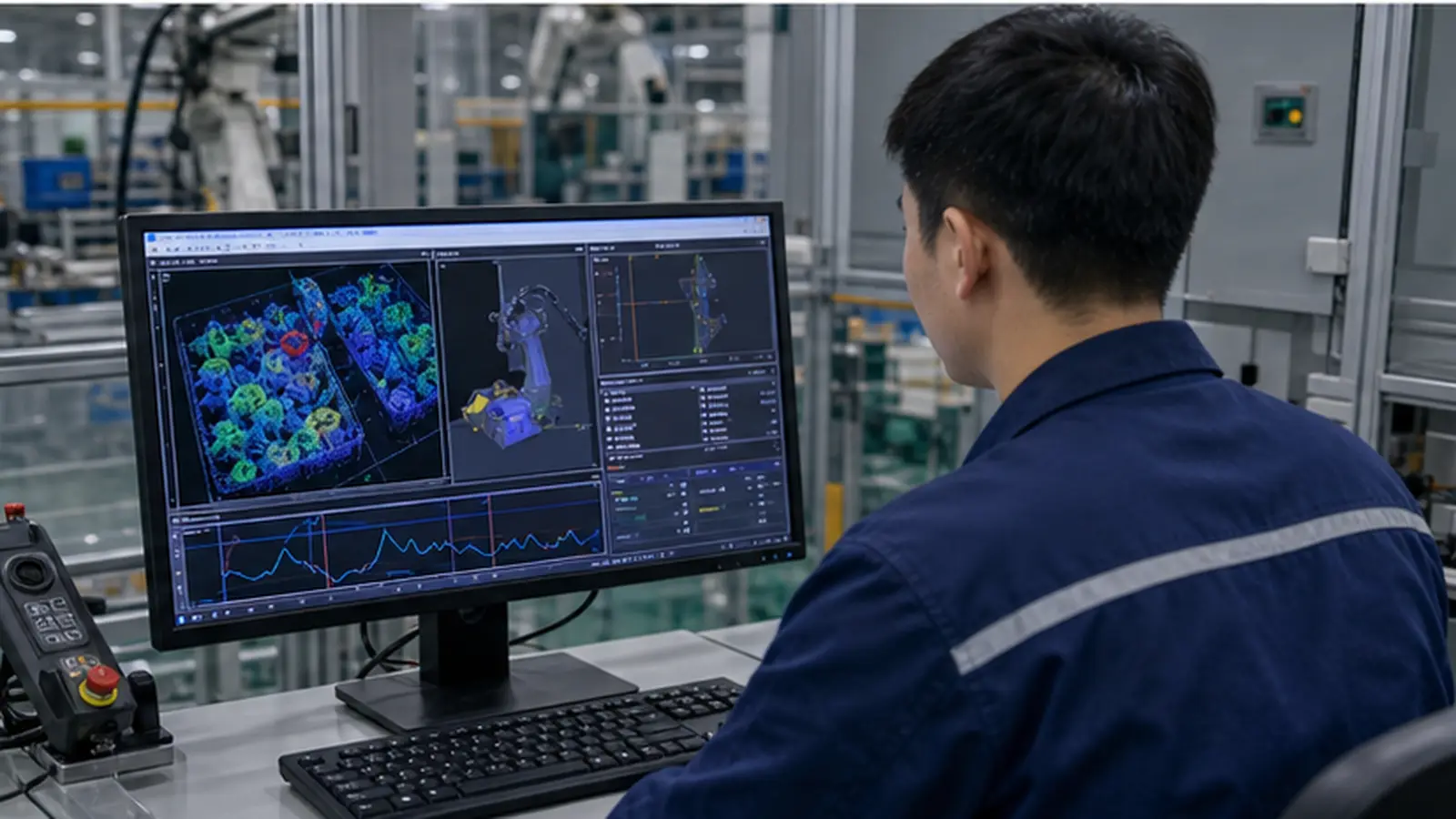
Integrasi talian dan rekod tempatan
sel robot berpandu 3D vision untuk loading dan unloading memerlukan lebih daripada OK/NG. Order, kelompok, resipi, imej, keputusan, semakan dan exception disimpan secara tempatan.
Penyelenggaraan memantau lampu, lensa, lekapan wear, camera shift, disk, sampel hanyutan dan kebenaran.
Kekangan tapak sering lebih penting daripada kompleksiti algoritma; proses, peralatan, kualiti dan IT perlu menilai bersama.
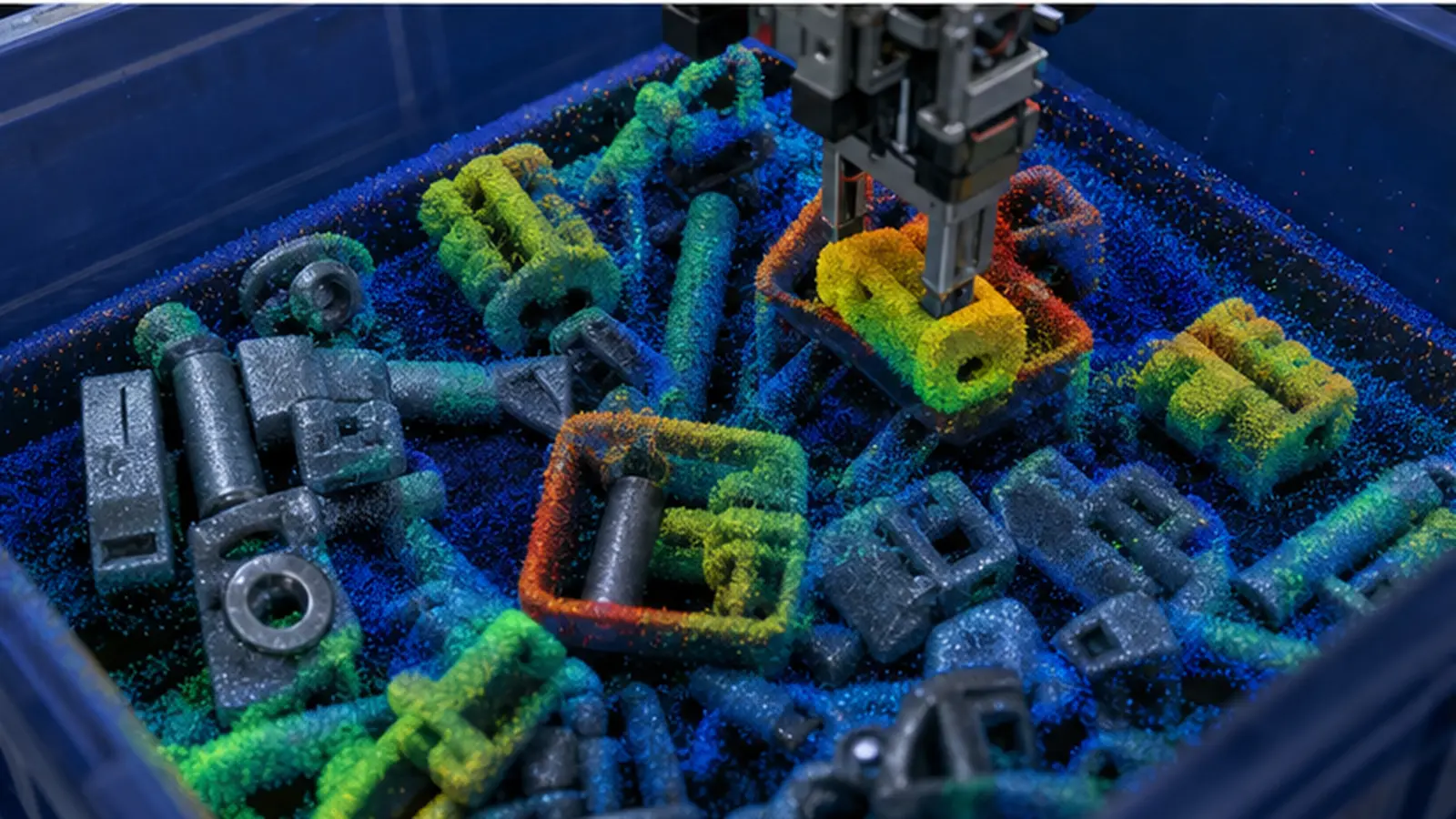
Perpustakaan sampel dan pengecualian
Perpustakaan sampel menyokong Sistem panduan robot 3D vision untuk loading dan unloading dengan komponen baik, kecacatan tipikal, sampel sempadan dan komponen baik yang mudah ditolak salah.
Kekangan tapak sering lebih penting daripada kompleksiti algoritma; proses, peralatan, kualiti dan IT perlu menilai bersama.
Kualiti imej bukan sekadar tajam. Refleksi, ketelusan, calar halus dan ukuran memerlukan optik berbeza.
Penerimaan, latihan dan penyelenggaraan
Penerimaan meliputi larian berterusan, kelajuan, pertukaran model, pemulihan, kebenaran, eksport, simpanan imej dan serah tugas penyelenggaraan.
Kualiti imej bukan sekadar tajam. Refleksi, ketelusan, calar halus dan ukuran memerlukan optik berbeza.
Data menerangkan setiap keputusan: imej, resipi, versi model, pencetus, semakaner dan tindakan.
Semakan sebelum replikasi
Apabila digunakan pada sel robot berpandu 3D vision untuk loading dan unloading lain, semak ruang, komponen masuk, lekapan, margin takt dan interface data semula.
Data menerangkan setiap keputusan: imej, resipi, versi model, pencetus, semakaner dan tindakan.
Kestabilan pengeluaran paling penting. resipi, model, sampel dan exception perlu sejarah.