

Saha neden bu çözüme ihtiyaç duyar
Bir 3D vision yönlendirmeli robot yükleme ve boşaltma hücresi zaten hız, fikstür ve kalite kurallarına sahiptir. Yükleme ve boşaltma için 3D vision robot yönlendirme sistemi değerlendirilmeden önce durdurucu kusurlar, inceleme durumları ve parçai verisi belirlenir.
Görüntü kalitesi sadece keskinlik değildir. Yansıma, şeffaflık, ince çizik ve ölçüm farklı optik ister.
Veri her kararı açıklar: görüntü, reçete, model sürümü, tetik, incelemeer ve aksiyon.
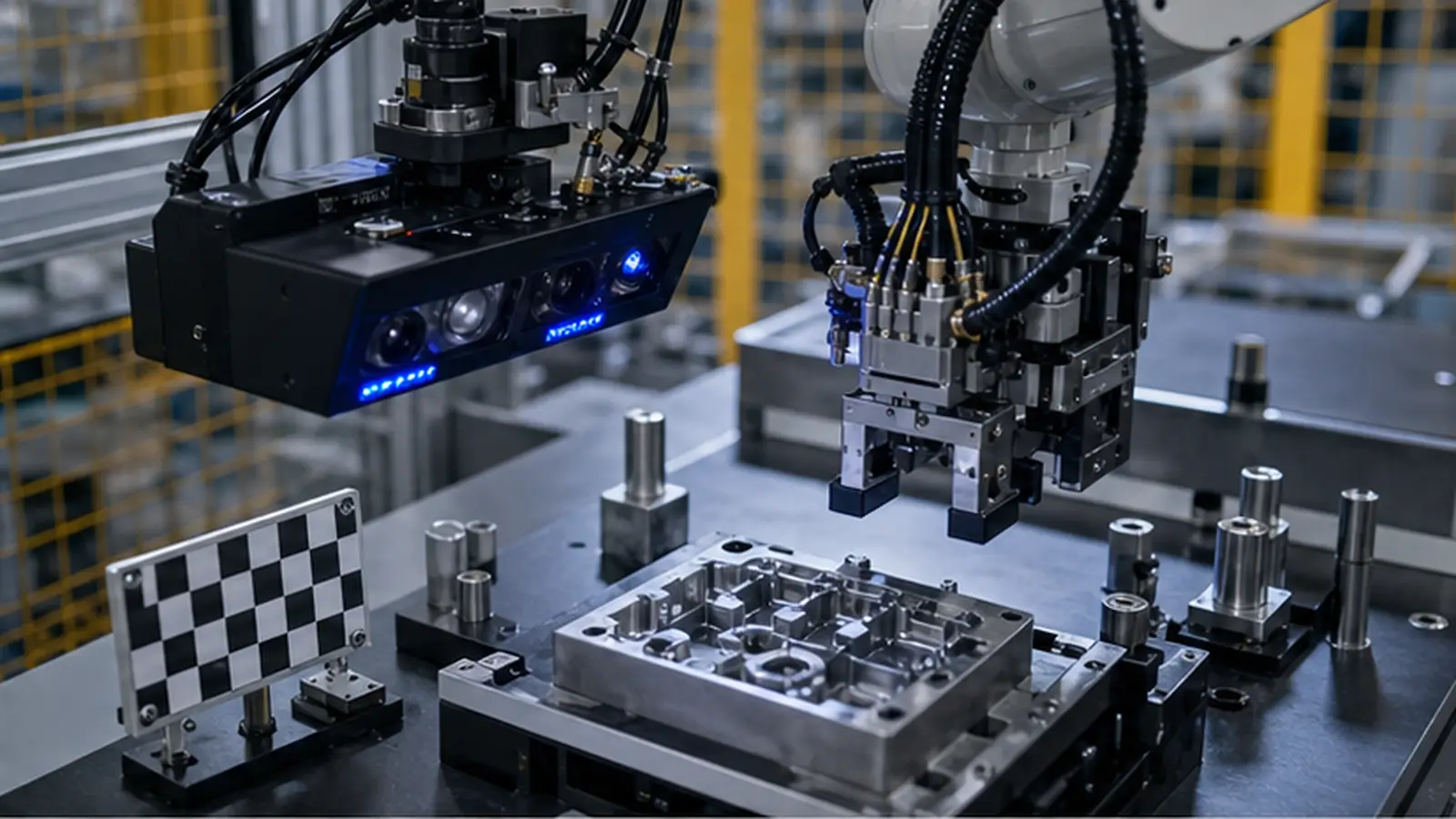
Kontrol nesnesi ve görüntü sınırı
Yükleme ve boşaltma için 3D vision robot yönlendirme sistemi malzeme, yansıma, şeffaflık, parça pozu ve giriş değişiminden etkilenir. Görüş alanı, lens, ışık, pozlama, tetik ve tekrar edilebilirlik birlikte tasarlanır.
Veri her kararı açıklar: görüntü, reçete, model sürümü, tetik, incelemeer ve aksiyon.
Üretim kararlılığı önceliklidir. Reçete, model, numune ve istisnalar kayıtlı olmalıdır.
Optik, mekanik ve takt
Kararlılık gerçek hızda test edilir: konveyör, konum, kod okuma, ışık ömrü, kamera bağlantısı, titreşim ve ortam ışığı.
Üretim kararlılığı önceliklidir. Reçete, model, numune ve istisnalar kayıtlı olmalıdır.
Retrofit için alan, kablo, pano ısısı, güvenlik, ayırma ve stop mantığı önemlidir.
Algoritma proses standardına uyar
model ve eşikler proses standardına hizmet eder. Sınır numuneler, hatalı ret, kaçırma riski ve reçete yayını için net kurallar gerekir.
Retrofit için alan, kablo, pano ısısı, güvenlik, ayırma ve stop mantığı önemlidir.
Bakım ışık, lens, fikstür aşınması, kamera kayması, disk, numune kayma ve yetkiyi izler.
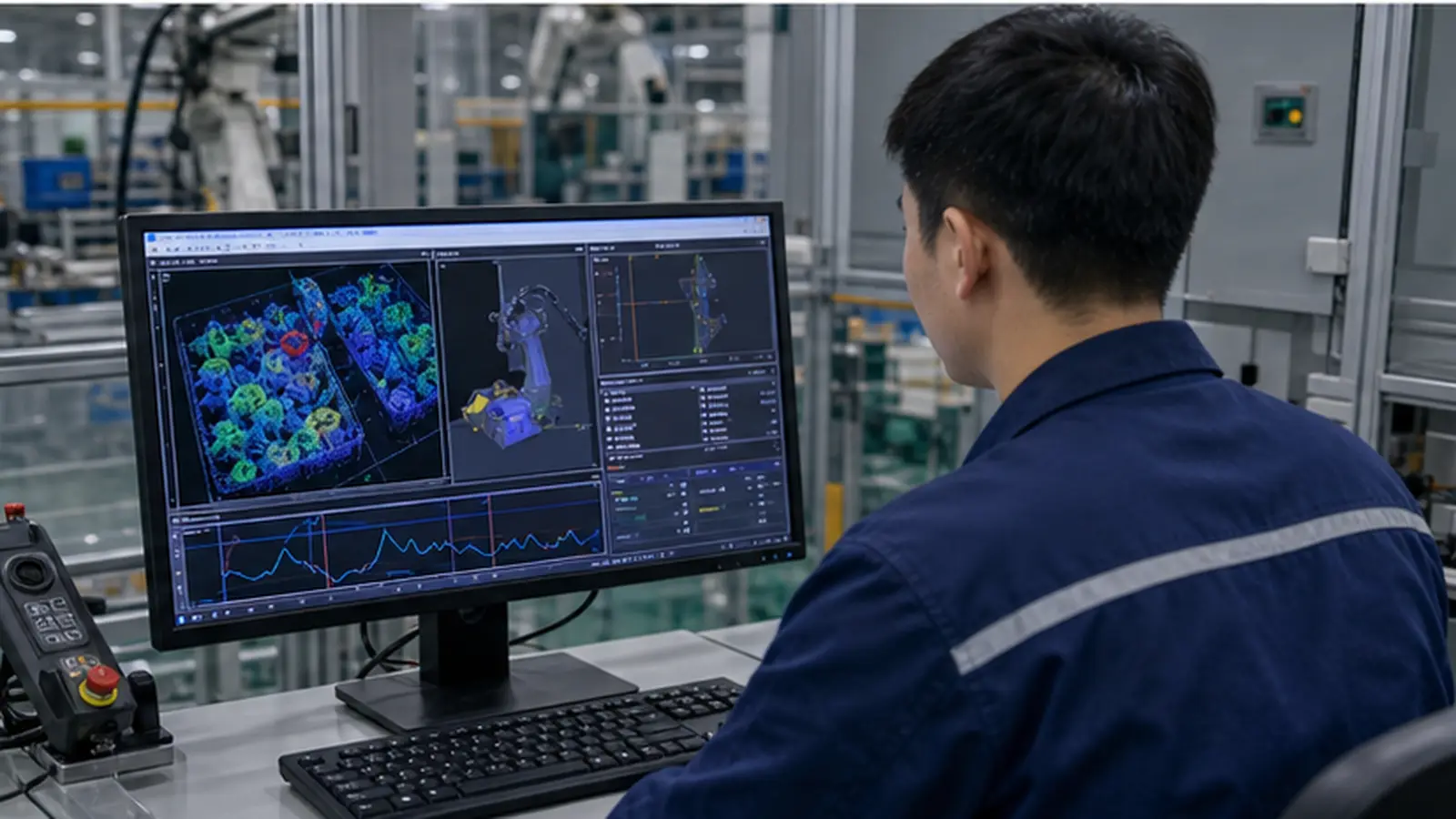
Hat entegrasyonu ve yerel kayıt
3D vision yönlendirmeli robot yükleme ve boşaltma hücresi yalnız OK/NG'den fazlasını ister. İş emri, parçai, reçete, görüntü, sonuç, inceleme ve istisna yerelde saklanır.
Bakım ışık, lens, fikstür aşınması, kamera kayması, disk, numune kayma ve yetkiyi izler.
Saha kısıtları çoğu zaman algoritma karmaşıklığından önemlidir; proses, ekipman, kalite ve IT birlikte incelemelidir.
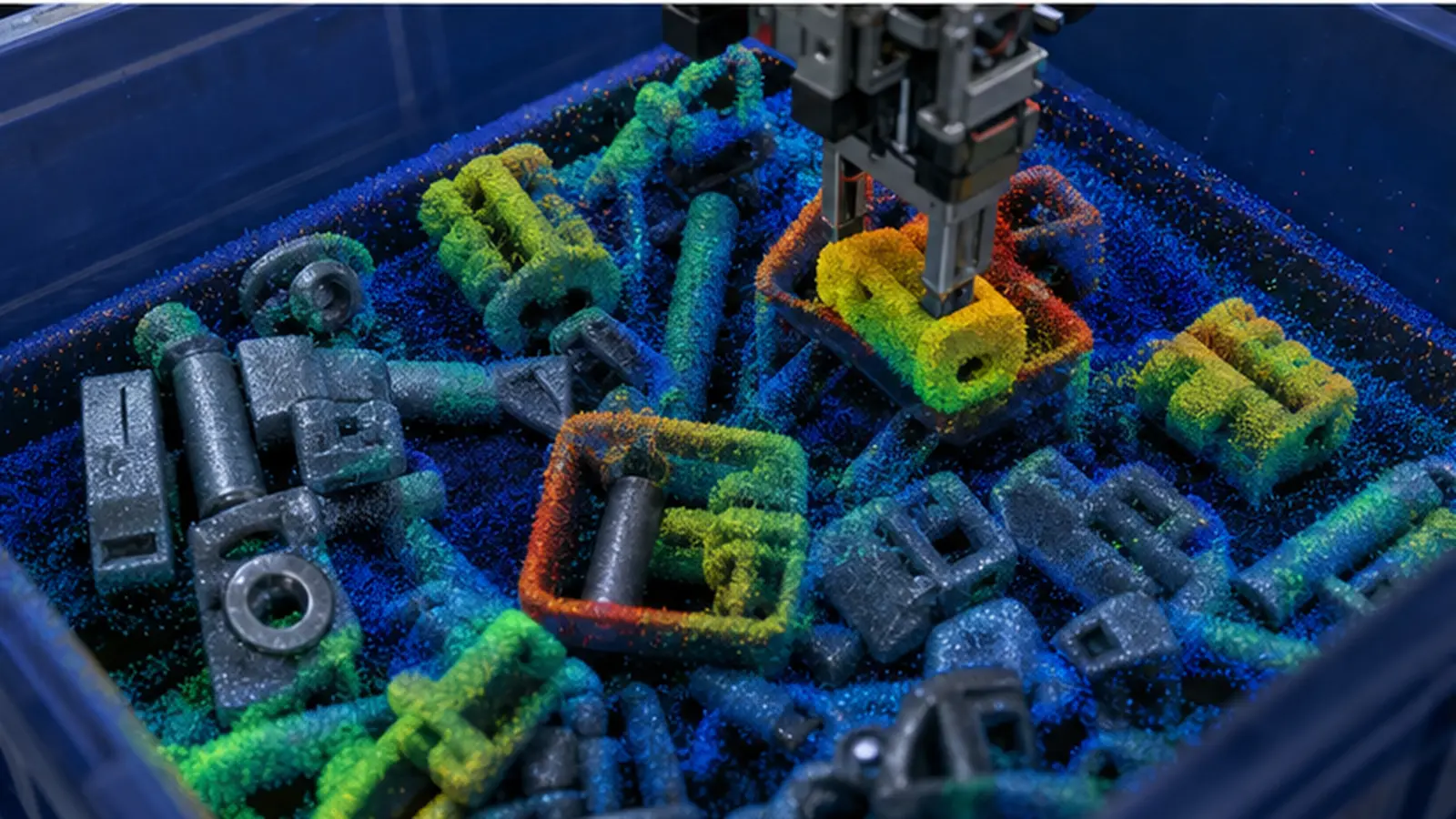
Numune kütüphanesi ve istisnalar
Numune kütüphanesi Yükleme ve boşaltma için 3D vision robot yönlendirme sistemi için uzun vadeli tabandır: iyi parçalar, tipik kusurlar, sınırlar ve yanlış reddedilebilecek iyi parçalar.
Saha kısıtları çoğu zaman algoritma karmaşıklığından önemlidir; proses, ekipman, kalite ve IT birlikte incelemelidir.
Görüntü kalitesi sadece keskinlik değildir. Yansıma, şeffaflık, ince çizik ve ölçüm farklı optik ister.
Kabul, eğitim ve bakım
Kabul; sürekli çalışma, hız, değişim, geri kazanım, yetki, dışa aktarım, görüntü saklama ve bakım devrini kapsar.
Görüntü kalitesi sadece keskinlik değildir. Yansıma, şeffaflık, ince çizik ve ölçüm farklı optik ister.
Veri her kararı açıklar: görüntü, reçete, model sürümü, tetik, incelemeer ve aksiyon.
Kopyalamadan önce kontrol
Başka bir 3D vision yönlendirmeli robot yükleme ve boşaltma hücresi için kopyalamadan önce alan, gelen parça, fikstür, takt payı ve veri arayüzleri yeniden kontrol edilir.
Veri her kararı açıklar: görüntü, reçete, model sürümü, tetik, incelemeer ve aksiyon.
Üretim kararlılığı önceliklidir. Reçete, model, numune ve istisnalar kayıtlı olmalıdır.