

साइट को इस समाधान की जरूरत क्यों है
3D विज़न robot loading और unloading cell में पहले से गति, फिक्स्चर और गुणवत्ता नियम होते हैं। लोडिंग और अनलोडिंग के लिए 3D विज़न रोबोट मार्गदर्शन प्रणाली से पहले रुकने वाले दोष, reदृश्य क्षेत्र वाले मामले और बैच डेटा तय होने चाहिए।
चित्र गुणवत्ता सिर्फ तीक्ष्णता नहीं है। परावर्तक, पारदर्शी, सूक्ष्म खरोंच और मापन दृश्य अलग ऑप्टिक्स मांगते हैं।
डेटा हर निर्णय को स्पष्ट करना करे: चित्र, रेसिपी, मॉडल संस्करण, ट्रिगर, reदृश्य क्षेत्रer और कार्रवाई प्रमाण श्रृंखला बनाते हैं।
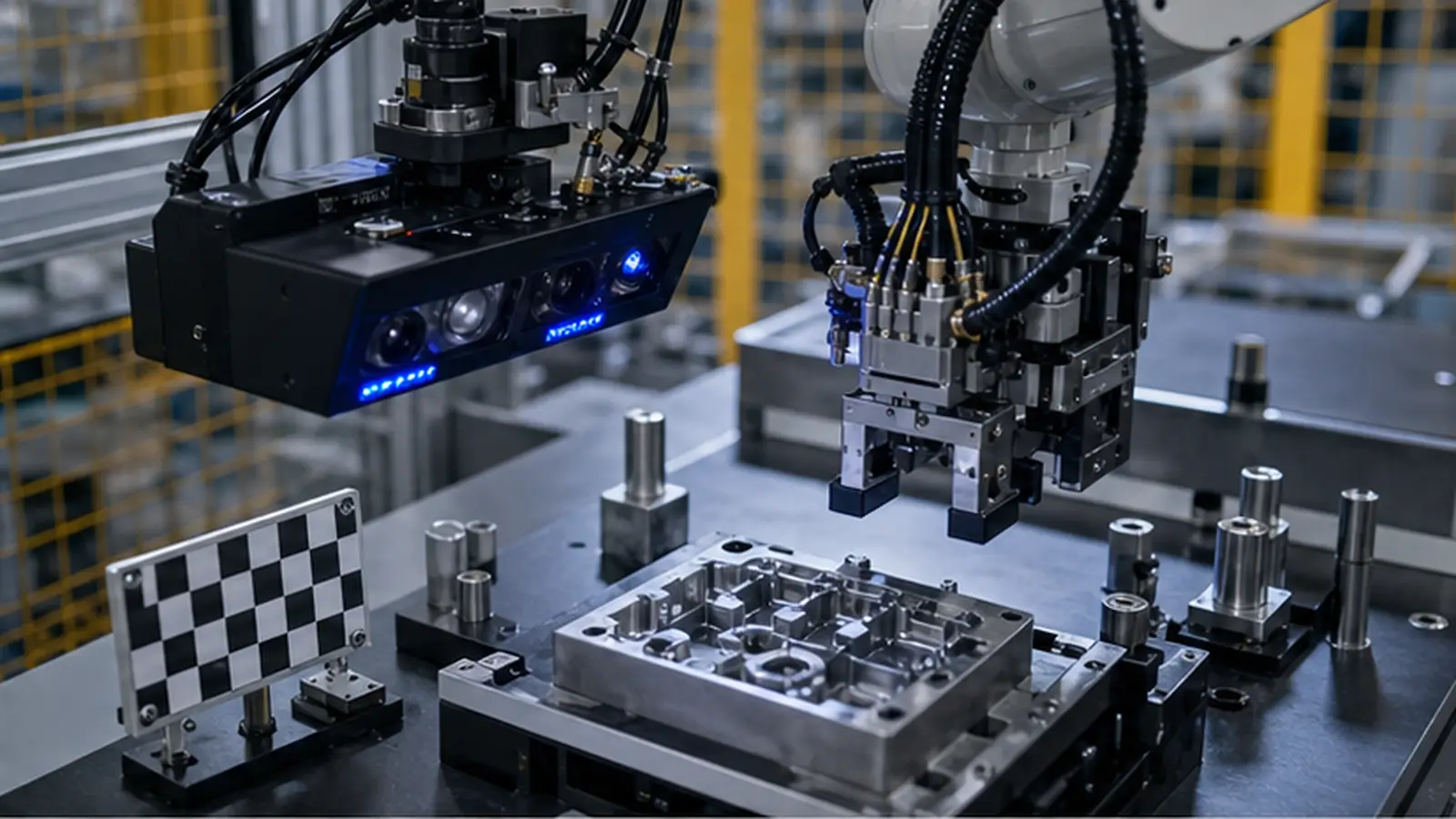
निरीक्षण वस्तु और इमेजिंग सीमा
लोडिंग और अनलोडिंग के लिए 3D विज़न रोबोट मार्गदर्शन प्रणाली सामग्री, परावर्तन, पारदर्शिता, भाग स्थिति और भिन्नता से प्रभावित होता है। दृश्य क्षेत्र, लेंस, प्रकाश, एक्सपोजर, ट्रिगर और दोहराव क्षमता साथ डिजाइन होते हैं।
डेटा हर निर्णय को स्पष्ट करना करे: चित्र, रेसिपी, मॉडल संस्करण, ट्रिगर, reदृश्य क्षेत्रer और कार्रवाई प्रमाण श्रृंखला बनाते हैं।
उत्पादन स्थिरता सबसे महत्वपूर्ण है। रेसिपी, मॉडल, नमूना और अपवाद परिवर्तन का रिकॉर्ड रहना चाहिए।
ऑप्टिक्स, मैकेनिक्स और गति
स्थिरता के लिए गति, स्थिति निर्धारण, कोड पढ़ना, प्रकाश आयु, कैमरा माउंट, कंपन और परिवेश प्रकाश को असली गति पर जांचना जरूरी है।
उत्पादन स्थिरता सबसे महत्वपूर्ण है। रेसिपी, मॉडल, नमूना और अपवाद परिवर्तन का रिकॉर्ड रहना चाहिए।
लाइन सुधार में स्थान, केबल, कैबिनेट ताप, सुरक्षा, अस्वीकृति प्रतिक्रिया और रोक तर्क महत्वपूर्ण हैं।
एल्गोरिदम प्रक्रिया मानक से जुड़ा रहे
मॉडल और threshold को प्रक्रिया मानक के अनुसार चलना चाहिए। सीमा नमूने, गलत अस्वीकृति, छूटने का जोखिम और रेसिपी जारी करना के नियम साफ होने चाहिए।
लाइन सुधार में स्थान, केबल, कैबिनेट ताप, सुरक्षा, अस्वीकृति प्रतिक्रिया और रोक तर्क महत्वपूर्ण हैं।
रखरखाव में प्रकाश, लेंस, फिक्स्चर घिसाव, कैमरा खिसकना, डिस्क, नमूना विचलन और अनुमतियां शामिल हैं।
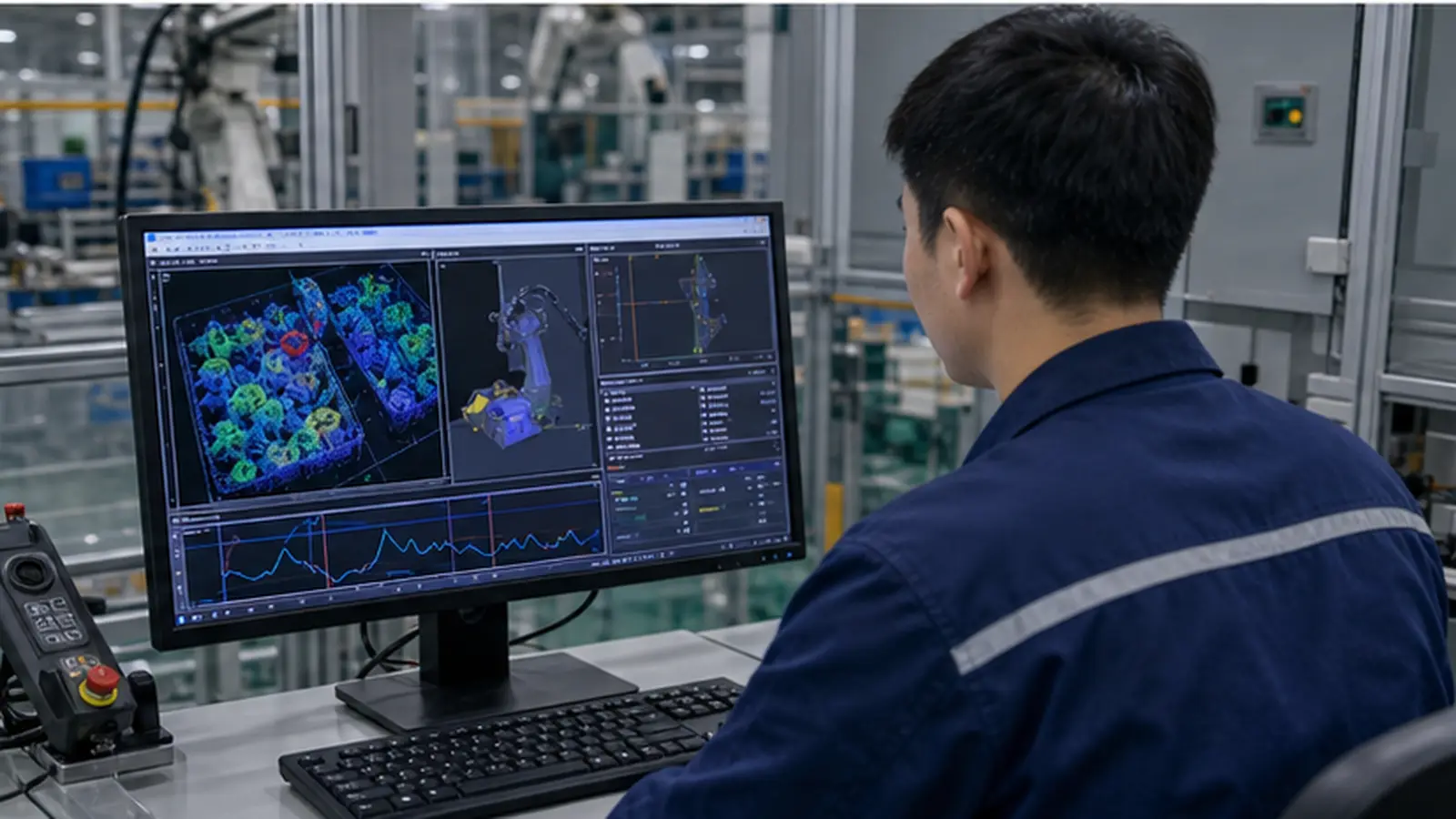
लाइन इंटीग्रेशन और स्थानीय रिकॉर्ड
3D विज़न robot loading और unloading cell को सिर्फ OK/NG से अधिक चाहिए। कार्य आदेश, बैच, रेसिपी, चित्र, परिणाम, reदृश्य क्षेत्र और अपवाद स्थानीय रूप से सुरक्षित होने चाहिए।
रखरखाव में प्रकाश, लेंस, फिक्स्चर घिसाव, कैमरा खिसकना, डिस्क, नमूना विचलन और अनुमतियां शामिल हैं।
साइट सीमाएं अक्सर एल्गोरिद्म जटिलता से ज्यादा महत्वपूर्ण होते हैं; प्रक्रिया, उपकरण, गुणवत्ता और IT को सीमा साथ जांचनी चाहिए।
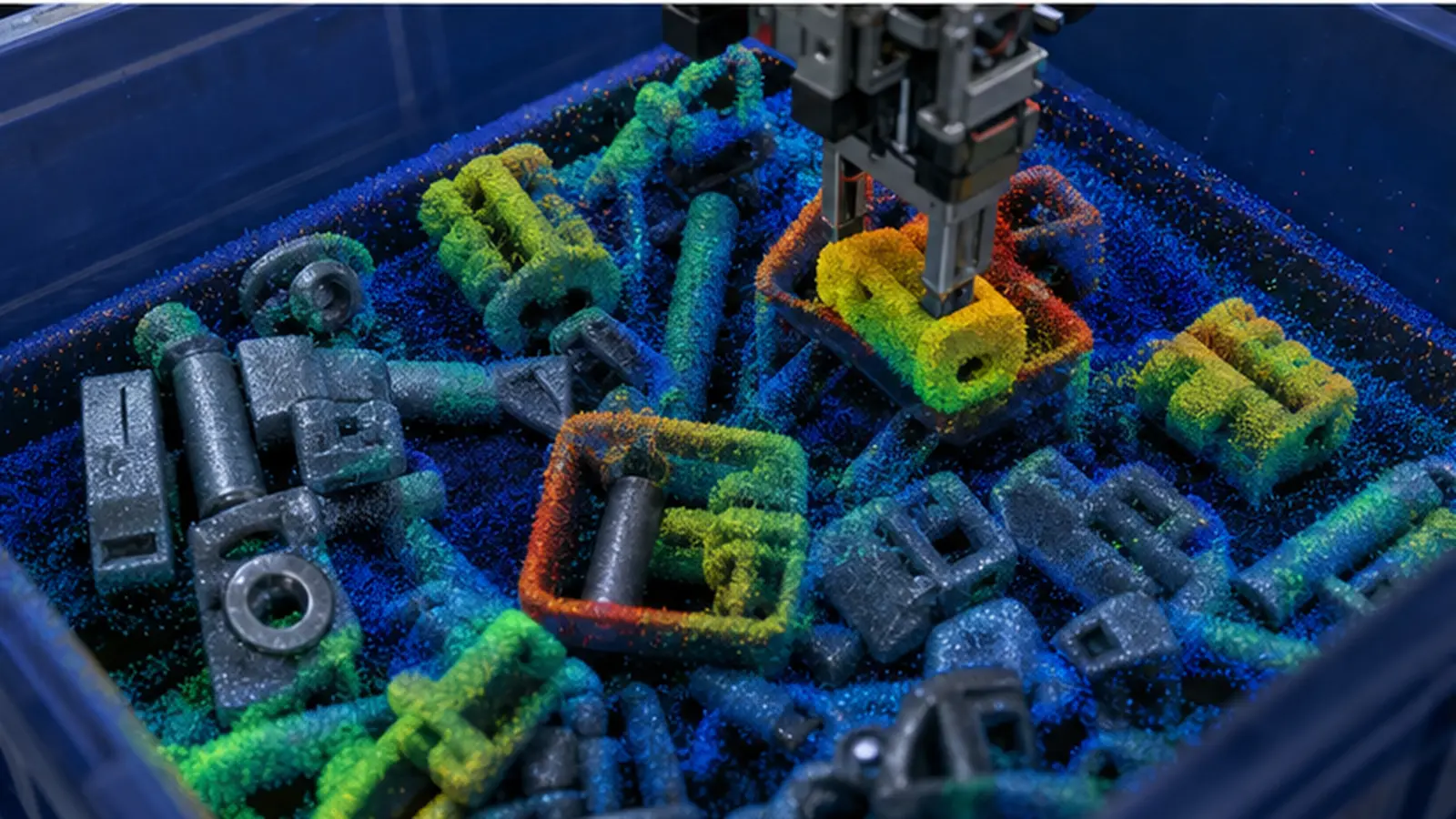
सैंपल लाइब्रेरी और अपवाद
नमूना पुस्तकालय लोडिंग और अनलोडिंग के लिए 3D विज़न रोबोट मार्गदर्शन प्रणाली को लंबे समय तक स्थिर रखती है, जिसमें अच्छे भाग, सामान्य दोष, सीमा नमूने और भ्रमित करने वाले अच्छे भाग शामिल होते हैं।
साइट सीमाएं अक्सर एल्गोरिद्म जटिलता से ज्यादा महत्वपूर्ण होते हैं; प्रक्रिया, उपकरण, गुणवत्ता और IT को सीमा साथ जांचनी चाहिए।
चित्र गुणवत्ता सिर्फ तीक्ष्णता नहीं है। परावर्तक, पारदर्शी, सूक्ष्म खरोंच और मापन दृश्य अलग ऑप्टिक्स मांगते हैं।
स्वीकृति, प्रशिक्षण और रखरखाव
स्वीकृति में लगातार संचालन, गति, changeover, पुनर्प्राप्ति, अनुमतियां, निर्यात, चित्र संरक्षण और रखरखाव हस्तांतरण शामिल होने चाहिए।
चित्र गुणवत्ता सिर्फ तीक्ष्णता नहीं है। परावर्तक, पारदर्शी, सूक्ष्म खरोंच और मापन दृश्य अलग ऑप्टिक्स मांगते हैं।
डेटा हर निर्णय को स्पष्ट करना करे: चित्र, रेसिपी, मॉडल संस्करण, ट्रिगर, reदृश्य क्षेत्रer और कार्रवाई प्रमाण श्रृंखला बनाते हैं।
दूसरी लाइन पर लागू करने से पहले
दूसरी 3D विज़न robot loading और unloading cell पर लागू करने से पहले स्टेशन स्थान, आने वाले भाग, फिक्स्चर अंतर, उत्पादन ताल मार्जिन और डेटा इंटरफेस फिर से जांचे जाते हैं।
डेटा हर निर्णय को स्पष्ट करना करे: चित्र, रेसिपी, मॉडल संस्करण, ट्रिगर, reदृश्य क्षेत्रer और कार्रवाई प्रमाण श्रृंखला बनाते हैं।
उत्पादन स्थिरता सबसे महत्वपूर्ण है। रेसिपी, मॉडल, नमूना और अपवाद परिवर्तन का रिकॉर्ड रहना चाहिए।