เป้าหมายไซต์และขอบเขต
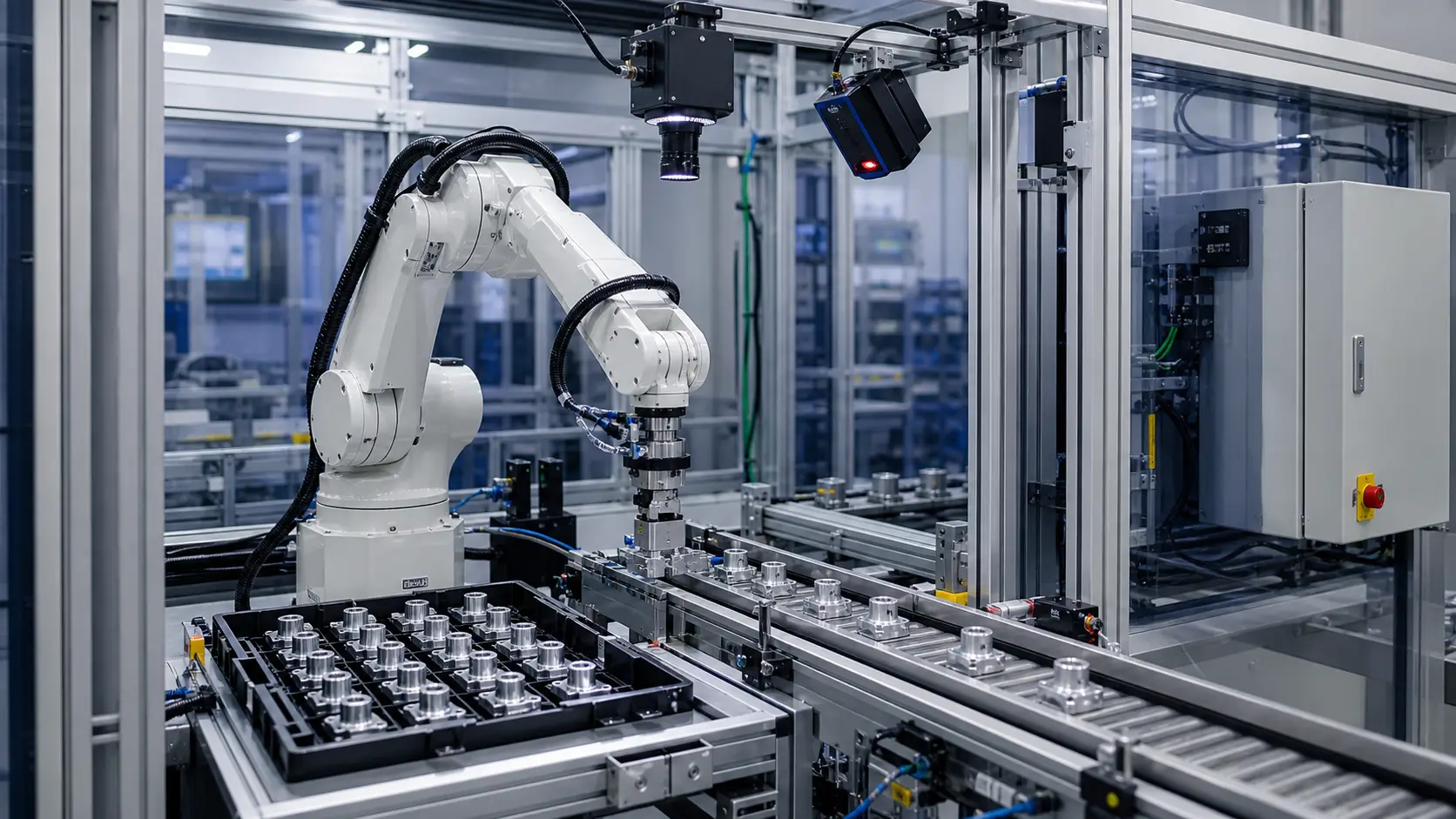
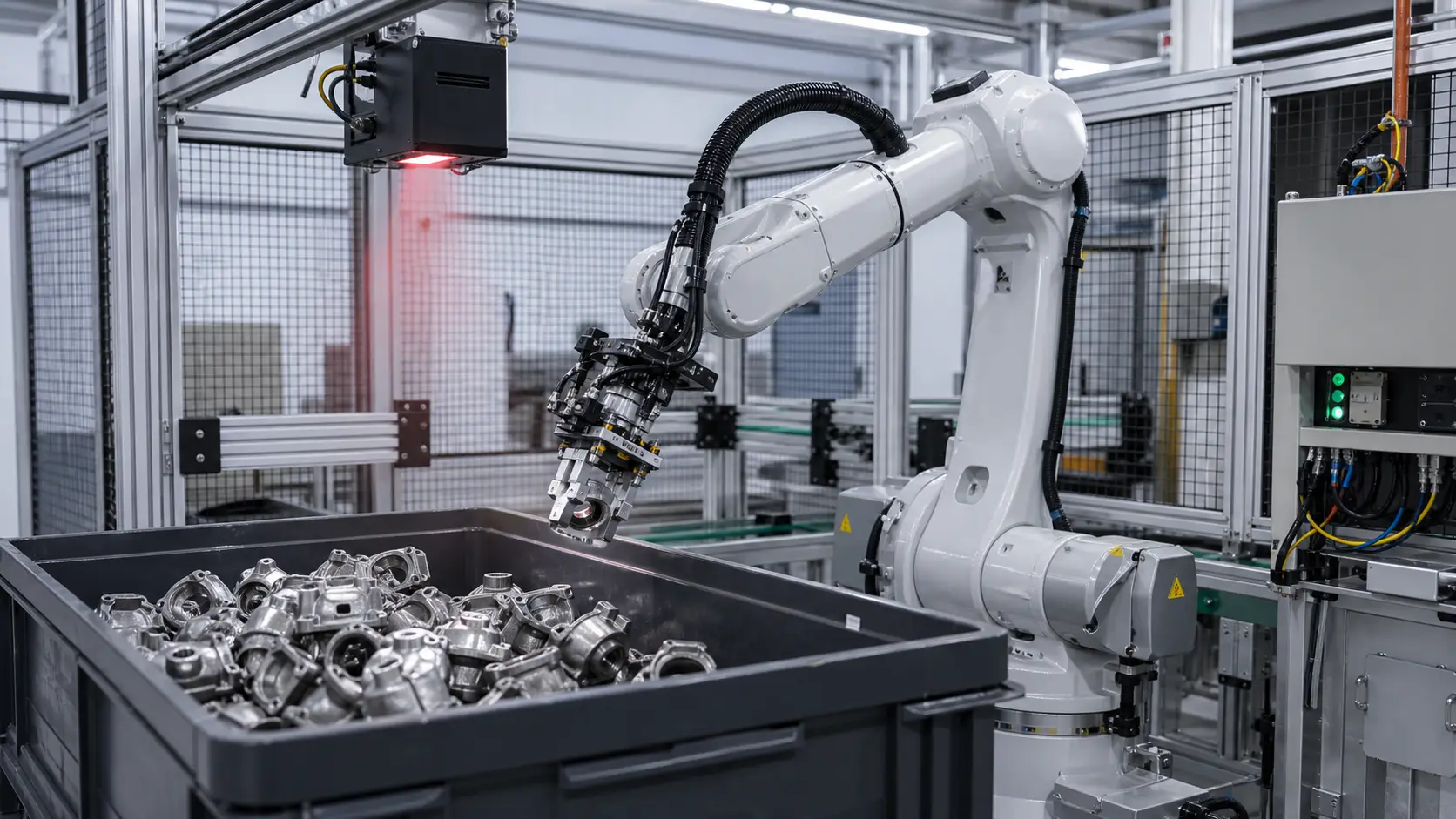
หุ่นยนต์โหลดงานนำทางด้วย 3D วิชัน ไม่ใช่เดโมครั้งเดียว แต่เป็นการเชื่อมสินค้าจริง มาตรฐาน ข้อบกพร่อง จังหวะการผลิต และความรับผิดชอบคุณภาพให้เป็นวงจรวิศวกรรมเดียว
ภาพ อัลกอริทึม และอุปกรณ์
โซ่ภาพต้องรวมกล้อง เลนส์ แสง สัญญาณทริกเกอร์ ฟิกซ์เจอร์ การประมวลผลที่ขอบเครือข่าย และ สูตร ของซอฟต์แวร์ อัลกอริทึมจะเชื่อถือได้เมื่อ ข้อบกพร่อง เห็นชัดและเสถียร
การเชื่อมต่อไลน์และข้อมูลภายใน
ระบบควรเก็บสัญญาณ PLC คำสั่ง MES รุ่นผลิต สูตร เวอร์ชัน ของ โมเดล ภาพต้นฉบับ ภาพผลลัพธ์ และ บันทึก การ การทบทวน ไว้ในเครื่อง แม้เครือข่ายขาด การตรวจและหลักฐานยังต้องเดินต่อ

ตัวอย่าง การ การทบทวน และการตัดสินผิด
คลังตัวอย่าง ต้องมีชิ้นดี ข้อบกพร่อง ทั่วไป ตัวอย่างขอบเขต และชิ้นดีที่ถูก คัดออก ง่าย ทุก การทบทวน ต้องมีเหตุผล ผู้รับผิดชอบ เวอร์ชัน และทาง การย้อนกลับ
การตรวจรับ บำรุงรักษา และขยายผล
การตรวจรับควรครอบคลุมการเดินต่อเนื่อง ระยะเผื่อ ของ จังหวะผลิต การ คัดออก ผิด ความเสี่ยง ข้อบกพร่องที่พลาดตรวจ การ การกู้คืน สิทธิ์ ตรวจย้อนกลับ ช่องข้อมูล และรอบ การบำรุงรักษา