Matlamat tapak dan sempadan
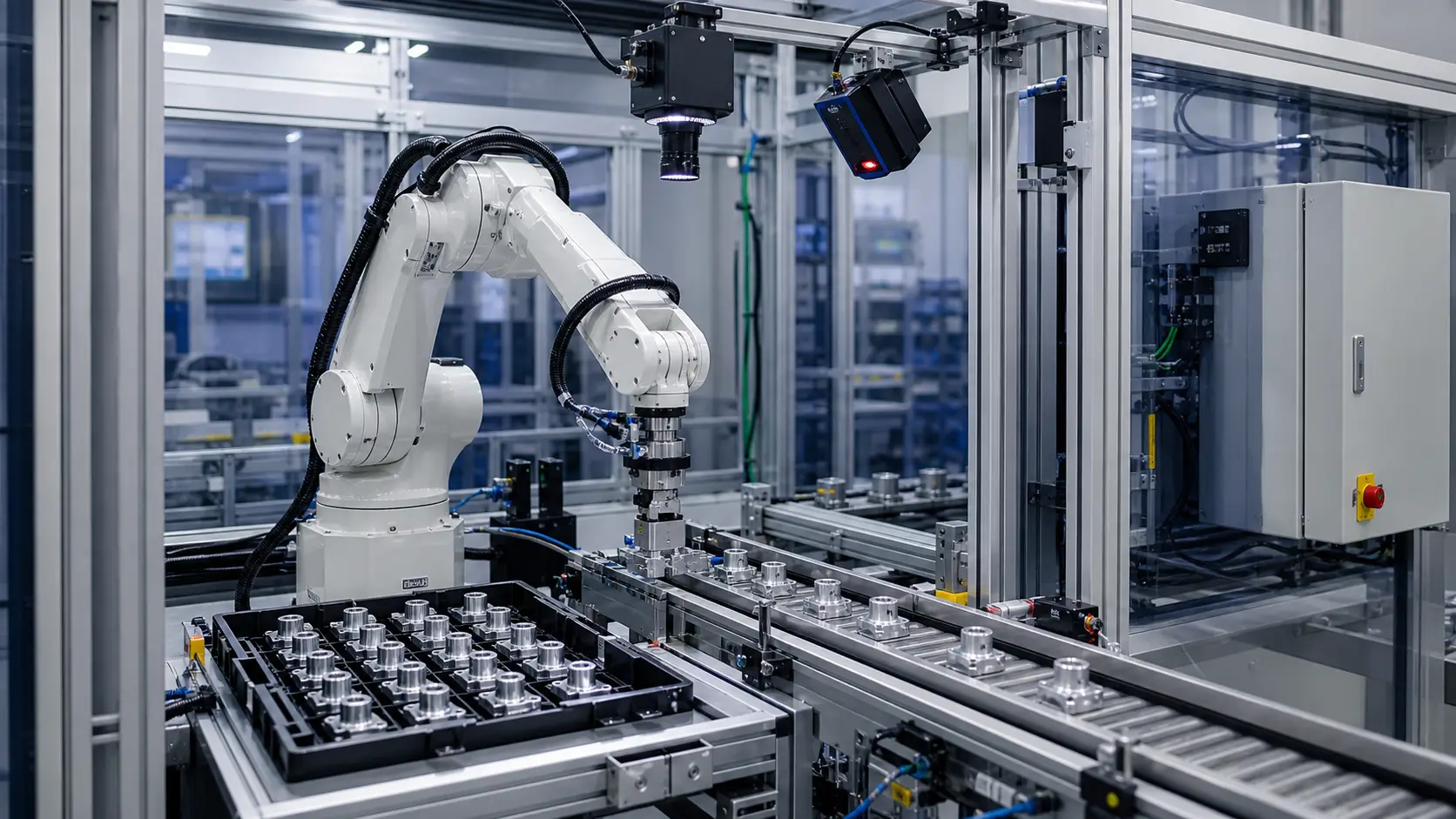
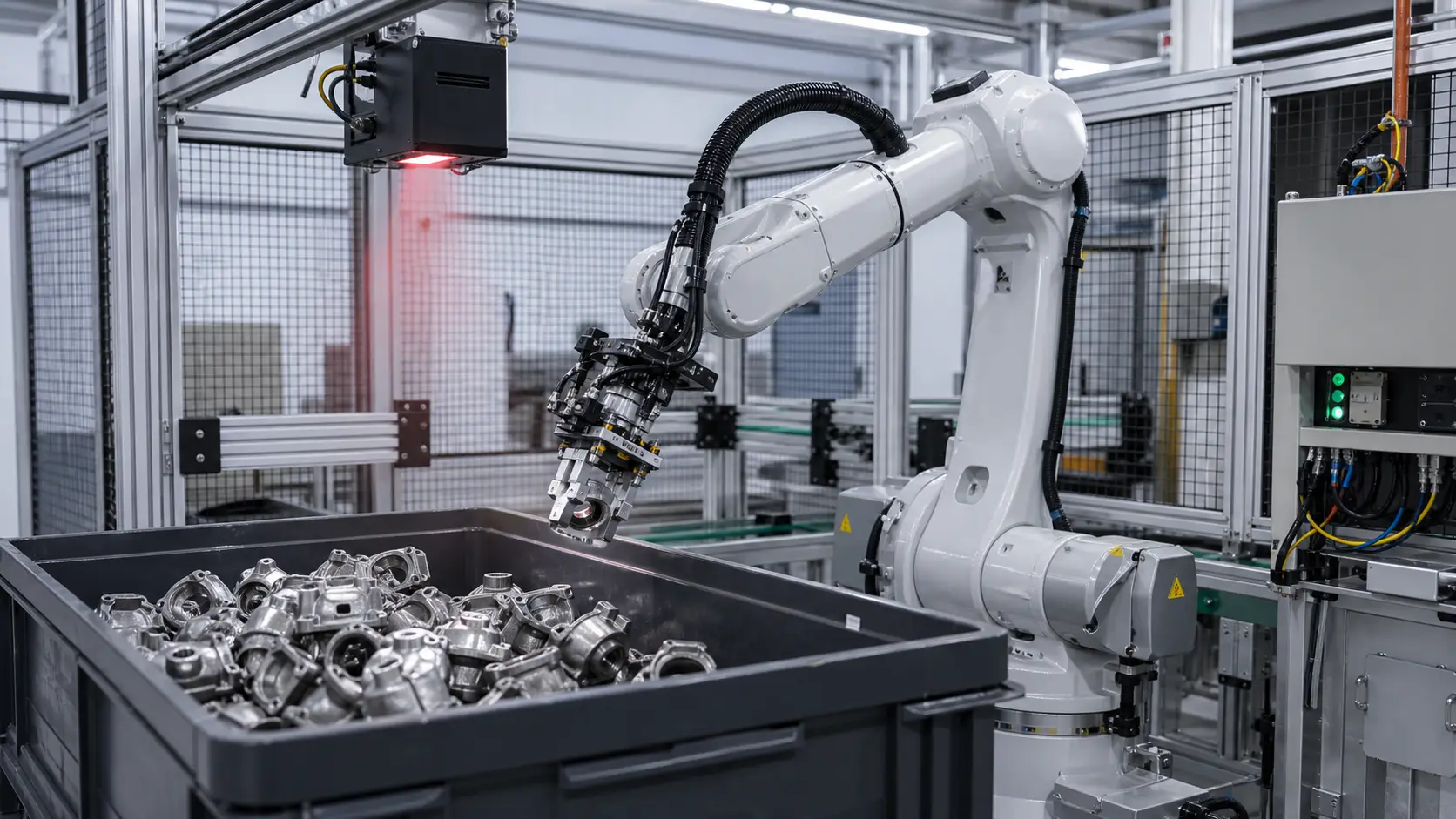
Robot loading berpandu 3D vision bukan demo sekali sahaja. Ia menghubungkan produk sebenar, standard kecacatan, rentak produksi dan tanggungjawab kualiti dalam satu gelung kejuruteraan.
Imej, algoritma dan peralatan
Rantaian imej merangkumi kamera, lensaa, lampu, pencetus, lekapan, edge computing dan resipi perisian. Algoritma hanya boleh dipercayai apabila kecacatan kelihatan stabil.
Integrasi barisan dan data tempatan
Sistem menyimpan isyarat PLC, pesanan MES, kelompok, resipi, versi model, imej asal, imej hasil dan rekod semakan secara tempatan. Pemeriksaan dan bukti terus berjalan walaupun rangkaian putus.

Sampel, semakan dan keputusan salah
Library sampel perlu ada komponen baik, kecacatan biasa, sampel sempadan dan komponen baik yang mudah ditolak salah. Setiap semakan merekod sebab, pemilik, versi dan laluan pemulihan versi.
Penerimaan, penyelenggaraan dan replikasi
Penerimaan merangkumi run berterusan, margin takt, tolak salah, risiko kecacatan terlepas, pemulihan, kebenaran, kebolehkesanan field dan kitaran penyelenggaraan.