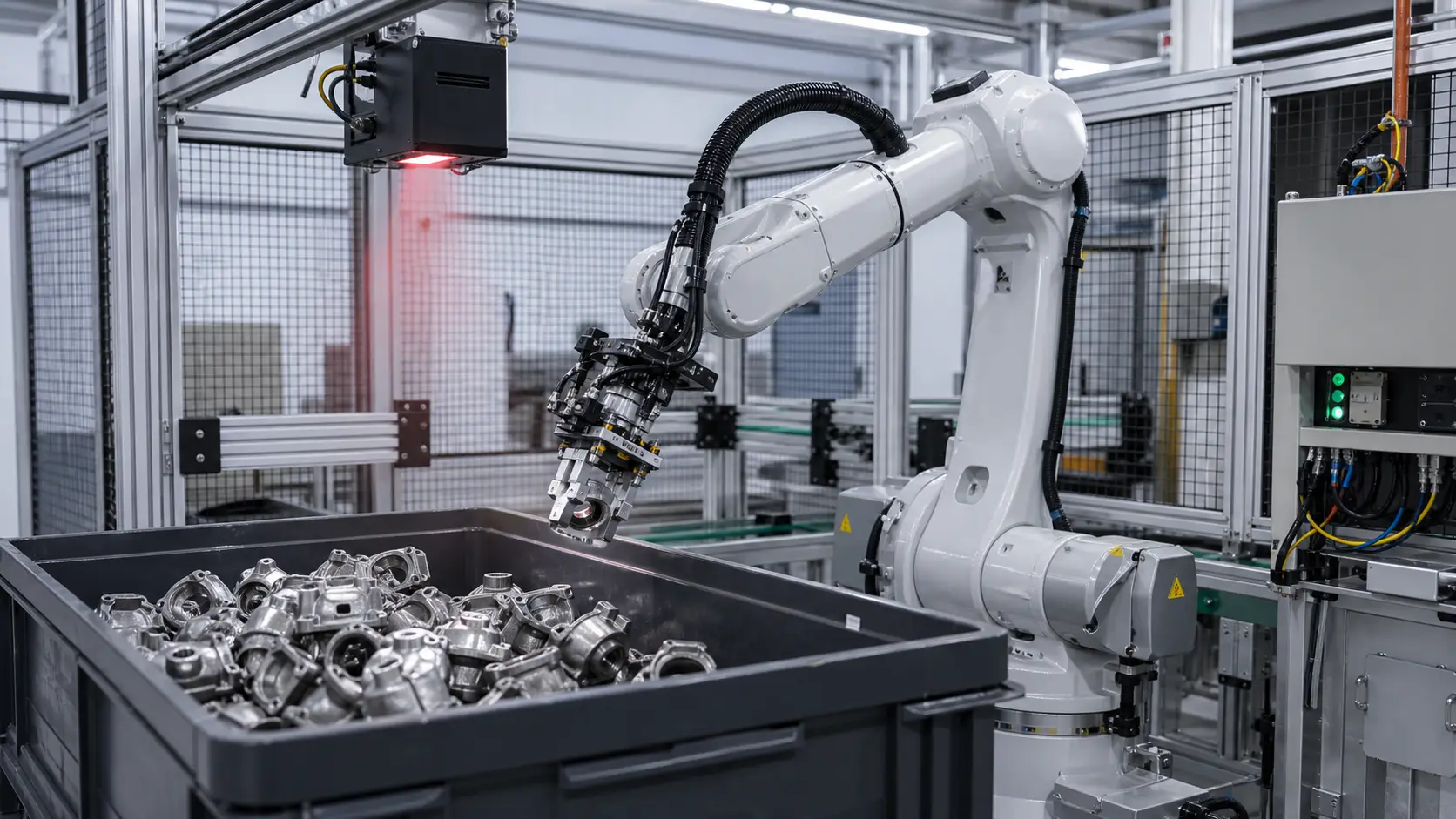
Mục tiêu hiện trường và ranh giới
Robot loading dẫn hướng bằng 3D vision không phải là một lần demo. Nó nối sản phẩm thật, chuẩn lỗi, nhịp sản xuất và trách nhiệm chất lượng thành một vòng kỹ thuật.
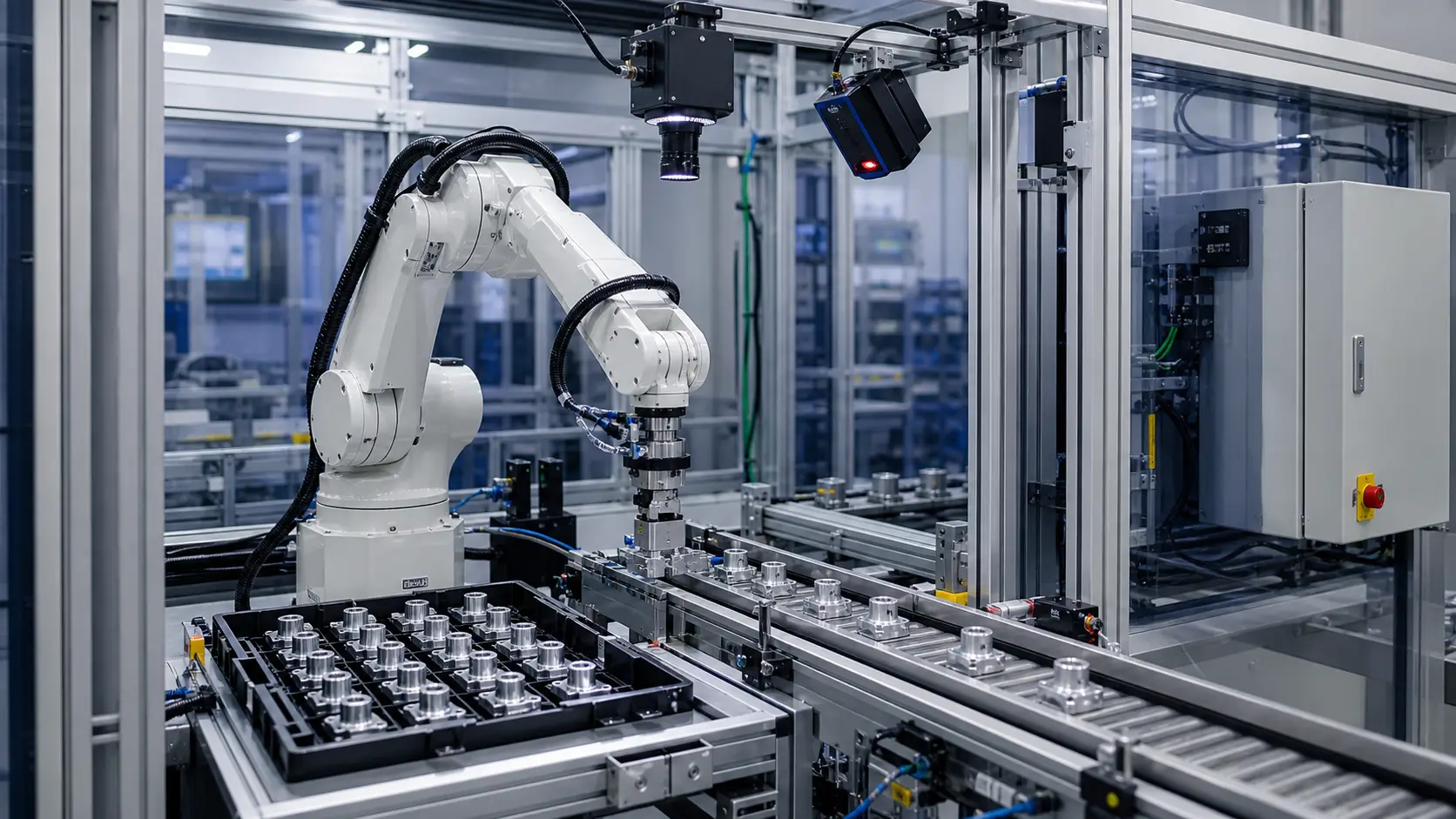
Hình ảnh, thuật toán và thiết bị
Chuỗi hình ảnh gồm camera, ống kính, đèn, tín hiệu kích hoạt, đồ gá, edge computing và công thức phần mềm. Thuật toán chỉ đáng tin khi lỗi hiển thị ổn định.
Tích hợp dây chuyền và dữ liệu cục bộ
Hệ thống cần lưu cục bộ tín hiệu PLC, lệnh MES, lô, công thức, phiên bản mô hình, ảnh gốc, ảnh kết quả và hồ sơ rà soát. Khi mất mạng, kiểm tra và lưu bằng chứng vẫn tiếp tục.

Mẫu, rà soát và phán đoán sai
Thư viện mẫu cần có hàng tốt, lỗi điển hình, mẫu biên và hàng tốt dễ bị loại nhầm. Mỗi rà soát phải ghi nguyên nhân, người phụ trách, phiên bản và cách khôi phục.
Nghiệm thu, bảo trì và nhân rộng
Nghiệm thu bao gồm chạy liên tục, dư địa takt, loại nhầm, rủi ro bỏ sót, phục hồi, quyền, trường truy xuất và chu kỳ bảo trì để dễ nhân rộng.