Objetivo de planta y límites
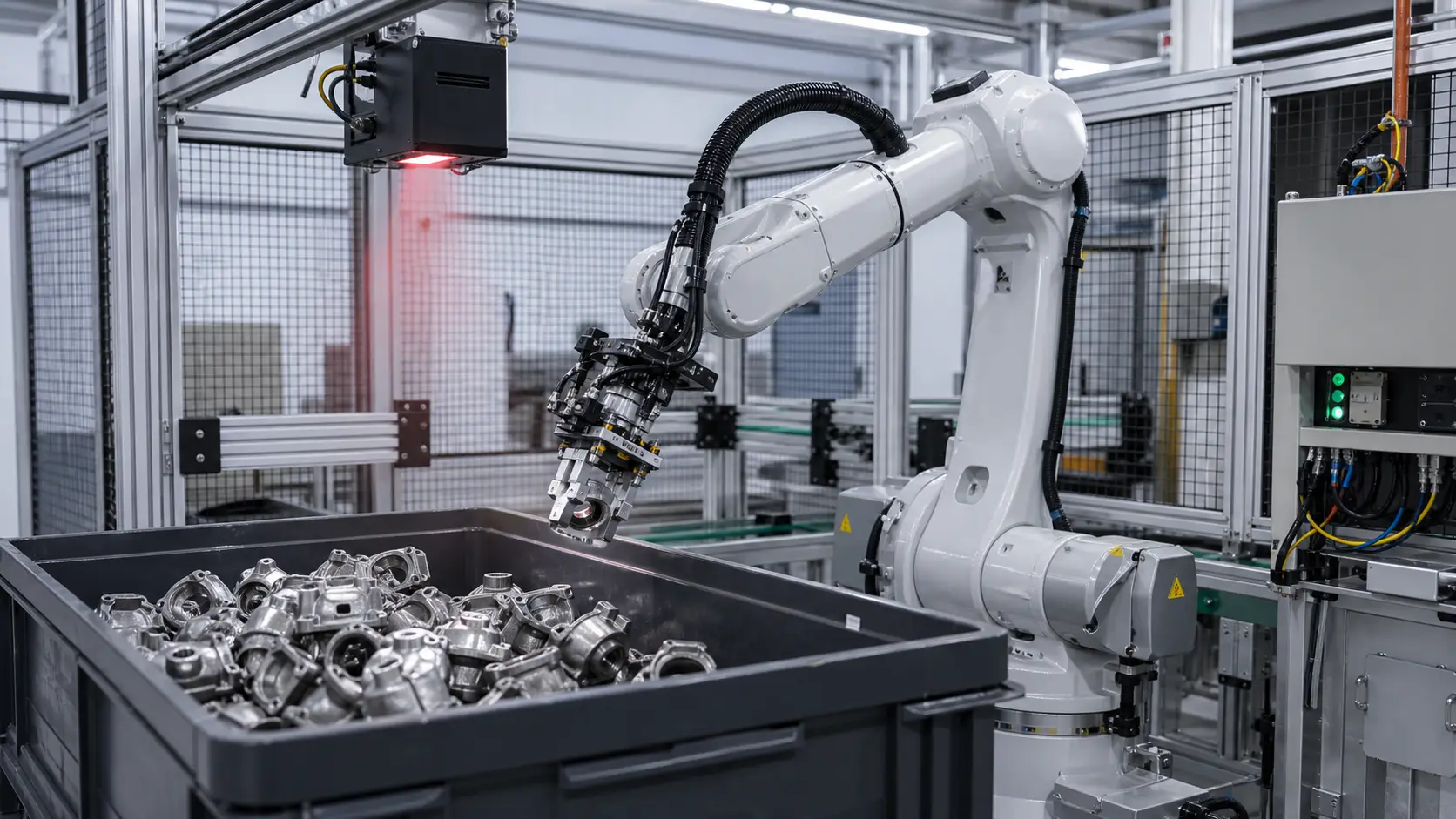
Guiado robótico con visión 3D no es una demostración puntual. Conecta producto real, estándar de defecto, ritmo de producción y responsabilidad de calidad en un bucle de ingeniería.
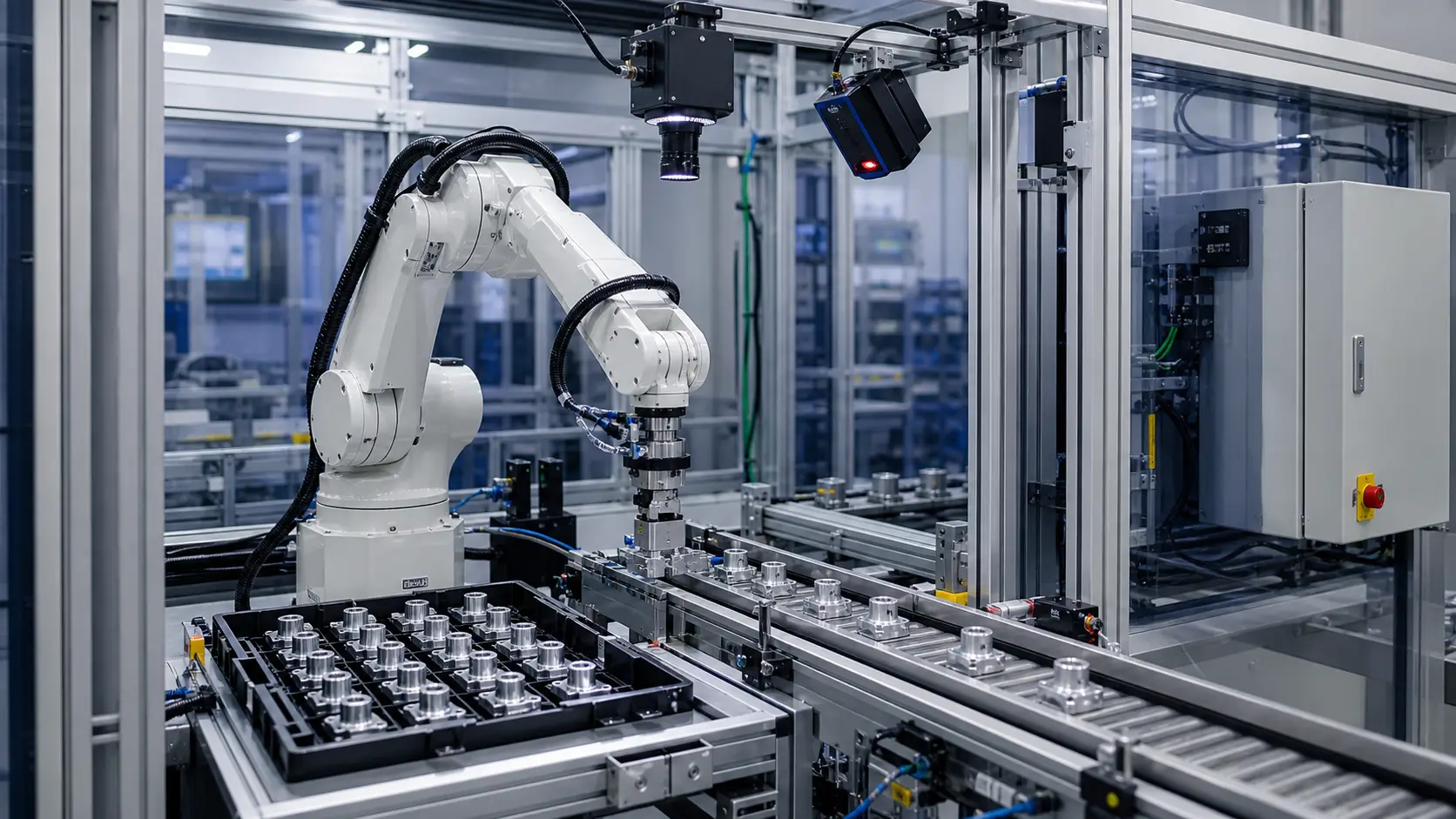
Imagen, algoritmo y equipo
La cadena de imagen cubre cámara, lente, iluminación, disparo, útil, edge computing y receta de software. El algoritmo solo es fiable cuando el defecto aparece de forma estable.
Integración de línea y datos locales
El sistema debe guardar localmente señales PLC, órdenes MES, lotes, recetas, versiones de modelo, imágenes originales, resultados y revisiones. La inspección continúa aunque no haya red.

Muestras, revisión y falsos juicios
La biblioteca de muestras incluye piezas buenas, defectos típicos, límites y piezas buenas fáciles de rechazar por error. Cada revisión registra causa, responsable, versión y retorno.
Aceptación, mantenimiento y réplica
La aceptación cubre marcha continua, margen de ciclo, falso rechazo, riesgo de defecto perdido, recuperación, permisos, trazabilidad y mantenimiento para poder replicar la línea.