

视觉定位是工艺动作的前置条件
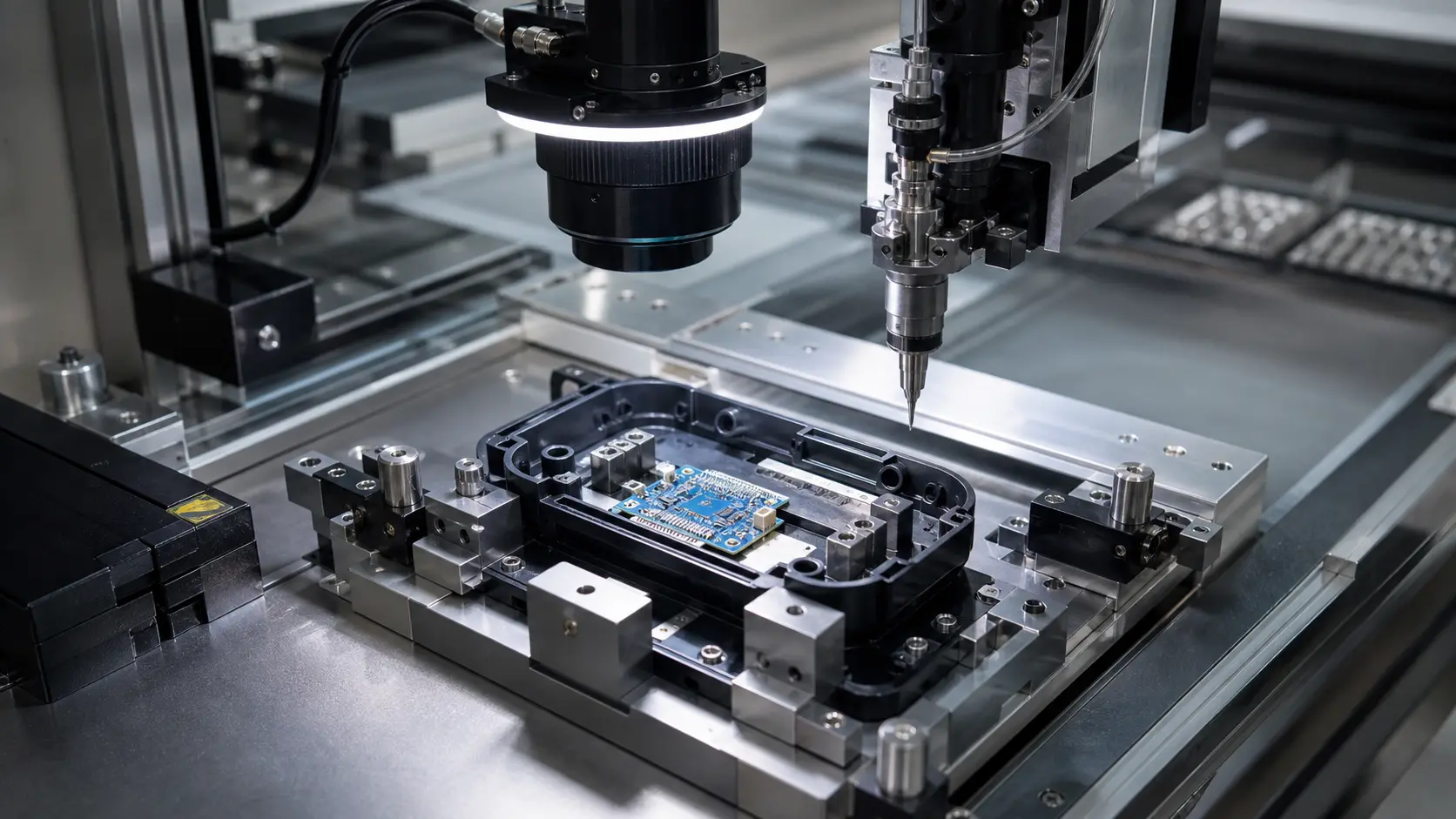
在点胶、拧紧、压装、贴合、焊接和机器人装配中,产品位置和姿态会直接影响工艺质量。视觉定位的作用不是让设备看起来更智能,而是让后续工艺动作落在正确位置。
如果治具重复性很好,视觉可能只需要做确认;如果产品放置波动大,视觉就要计算补偿;如果工件柔性、反光或遮挡严重,可能还需要多相机或 3D 辅助。定位需求要根据工艺风险决定。
视觉引导装配项目失败,常见原因是只关注定位算法,却忽略治具、夹爪、机器人坐标和工艺窗口。相机识别正确,但工具动作仍然错位,这说明系统没有形成完整闭环。
基准设计比算法更早
视觉定位首先要有可靠基准。可以是产品轮廓、孔位、边缘、特征点、标记点或治具基准。基准必须在不同批次、不同光照和不同姿态下稳定可见,否则定位结果会随现场变化漂移。
有些产品本身没有稳定特征,此时应考虑治具辅助、工艺标记或增加可见基准。强行在低对比、反光或遮挡区域做定位,会让算法难以维护。
基准设计还要考虑装配后的可见性。点胶前能看到的位置,点胶后可能被胶遮挡;压装前能看到的孔位,压装后可能消失。因此定位和复检可能需要不同视角。
坐标标定要能被现场复测
视觉引导机器人或平台动作时,需要把相机坐标转换为机器人、平台或工艺工具坐标。标定精度决定补偿是否有效。标定板、标准件、坐标系定义和复测流程必须清楚。
现场维护时,工程师应能用标准件确认标定是否漂移。相机支架松动、治具磨损、机器人零点变化和工具更换都可能造成坐标误差。如果没有复测流程,定位问题会被误认为算法问题。
对于多工位设备,不同相机和不同工具之间还要共享基准。每个工位单独准确,不代表整机坐标一致。系统需要记录补偿量和趋势,帮助发现机械漂移。
复检让装配质量可闭环
视觉定位只能证明动作前的位置合理,不能证明动作后结果一定合格。点胶后要看胶路,拧紧后要看零件状态,压装后要看高度或间隙,贴合后要看位置和气泡。复检是装配闭环的重要环节。
复检方式要根据质量风险选择。二维图像适合位置、方向、漏装和外观,2.5D 或 3D 适合高度、台阶和间隙,工具数据适合扭矩、压力和位移。多种数据结合后,质量结论更可靠。
复检结果还应和定位补偿、工艺参数关联。若某段时间补偿量变大或复检异常增加,工程师可以回到治具、来料、工具或机器人状态排查。
节拍优化不能牺牲确认动作
装配自动化通常对节拍要求高,容易为了速度减少拍照、复检或数据保存。但关键工艺如果没有确认动作,后续返修和客诉成本会更高。节拍优化应通过并行工位、缓存和动作路径优化实现。
双工位、转盘、多相机预拍和机器人动作并行都可以减少等待。相机在工艺动作前提前定位,机器人运动时准备下一件,复检和下料并行,这些方式比关闭检测更稳妥。
方案阶段应把定位、动作、复检和数据保存纳入同一张时序表。每一步耗时、是否并行、异常时如何恢复,都要可验证。
视觉引导装配适合逐步复制
企业可以先在一个高风险装配动作上导入视觉定位,例如点胶前定位、螺丝孔定位、连接器插接确认或机器人放置补偿。试点稳定后,再复制到同类工位。
复制时不要直接搬参数。不同治具、相机安装、产品批次和工艺窗口都会影响结果。应复制方法和验收口径,再针对新工位验证差异。
当多个装配工位都具备定位、复检和追溯数据后,企业可以建立更完整的装配质量画像,减少只依赖终检的被动模式。
七、样件评估要先把边界说透
视觉引导装配与定位项目在启动前,最重要的不是马上确定设备型号,而是把样件边界、质量标准和现场节拍写清楚。企业应准备正常件、典型不良件、边界样件和容易误判的良品,并记录批次、材料、表面状态、尺寸波动和装配状态。只有样件覆盖真实波动,视觉方案才能判断哪些问题靠光学解决,哪些问题要靠治具、工艺或数据规则共同解决。
样件评估阶段还要确认定位基准、治具重复性、机器人坐标、工艺动作窗口、复检方式和异常停机策略。如果只给供应商几张照片,方案容易停留在概念层;如果能把相机视野、光源角度、检测节拍、误判成本、复判流程和数据接口一起拿出来讨论,项目很快就会进入工程状态。工业视觉检测系统、机器视觉检测设备和 AI 视觉检测的差异,也会在样件测试中变得清楚。
样件报告不要只写“可以检测”或“不可以检测”。更有价值的报告应说明推荐成像方式、当前样件覆盖范围、缺陷可见性、潜在误判来源、现场安装限制和下一轮验证建议。这样采购、质量、工艺和设备团队才能在同一份事实基础上决策,而不是各自按经验理解项目风险。
八、现场集成要把节拍、触发和动作对齐
视觉设备进入产线后,真正决定稳定性的往往是触发和动作链路。相机什么时候拍照,光源什么时候频闪,运动平台或输送带处于什么位置,PLC 什么时候读取结果,剔除、拧紧、点胶、打标或放行动作什么时候执行,这些都需要形成可复测的时序。只要其中一个环节漂移,视觉引导装配与定位就可能出现重复判断、漏检、错位或数据对不上的问题。
现场集成还要考虑异常恢复。相机掉线、光源报警、PLC 通讯中断、样件卡滞、硬盘接近容量上限、模型版本切换失败,这些情况在方案阶段就应有明确处理逻辑。成熟项目不会用默认成功、空结果或人工口头说明掩盖异常,而是把错误显示给现场,并给出停机、旁路、复判或恢复流程。
对于多工位或多产品场景,配方管理尤其关键。产品、相机、光源、算法、工艺参数、触发延迟和数据字段应绑定到同一个配方版本。换型时系统要确认当前配方与工单一致,避免用上一个产品的参数检测下一批产品。这样的规则看起来细,但它是减少批量质量事故的基础。
九、数据追溯要服务质量复盘
视觉引导装配与定位不应只输出一个合格或不合格结果。面向长期生产,系统应保存定位坐标、补偿量、治具编号、工艺参数、复检图像、机器人路径、工单号、异常记录等关键字段,并根据产品价值和客户要求决定原图、结果图、缺陷裁剪图和统计摘要的留存策略。高价值产品可以完整留证,普通批量件可以按异常样本、抽样策略或批次摘要保存,关键是规则要清晰并能执行。
数据追溯不是越多越好,而是要能回答真实质量问题。客户投诉时,质量工程师要知道当时使用了哪个模型版本、哪个配方、哪台相机、哪个工位、哪个批次和哪种判定规则;工艺复盘时,工程师要能按时间、缺陷类型、工单和设备状态检索样本。只有数据字段和现场动作对应起来,追溯系统才不是静态档案。
权限也要纳入设计。模型回退、阈值修改、配方发布、异常放行、样本删除和数据导出都应有角色控制和操作记录。工业视觉项目一旦进入量产,随意修改参数会比算法误判更危险。把权限边界和操作日志写进系统,才能让质量数据在审核、复盘和持续改善中保持可信。
十、验收要覆盖真实节拍和边界样件
验收阶段不能只看演示截图。应在目标节拍下连续运行,记录定位重复性、补偿成功率、装配良率、工艺复检、节拍余量、异常恢复,并把典型缺陷、边界样件和容易误判的良品都放进测试。对于产线自动化改造,还要确认工位切换、停机恢复、断网缓存、补传、报警复位和人工复判流程,避免设备在理想演示中通过、在夜班现场中失控。
验收报告要区分检测能力、联动能力和数据能力。检测能力关注缺陷是否能稳定出现并被正确判定;联动能力关注 PLC、运动控制、剔除或工艺动作是否与结果一致;数据能力关注图像、批次、配方、模型、人员和异常记录是否完整。三类能力缺一类,项目都不应被描述成完整上线。
如果项目涉及 AI 外观缺陷检测,还应单独记录训练样本来源、验证集样本、边界样本、误判复核和模型版本。AI 模型不是一次性资产,它会随着样件、材料、光源和工艺变化而需要维护。验收时把这些字段留下来,后续迭代才不会变成重新摸索。
十一、上线后的维护决定长期稳定
视觉系统上线后,维护对象不只是软件。相机镜头、光源亮度、治具定位、输送带速度、气压、喷嘴、机器人夹爪、控制柜温度和硬盘容量都会影响结果。建议把相机标定、治具定位复测、机器人坐标校验、标准件复检、光源清洁、补偿数据趋势分析写成周期性检查项,并让系统能够提示状态变化。很多视觉项目早期表现良好,几个月后变差,根因往往是维护项没有被制度化。
维护还包括样本复盘。现场每天产生的误判、复判和边界样本都应进入样件库,经质量和工艺人员确认后再用于阈值调整或模型迭代。不能把所有现场图片直接混入训练集,也不能只靠单个工程师经验决定新规则。样本库越规范,机器视觉检测设备越容易持续优化。
对多工厂或多产线企业来说,还应建立统一缺陷命名、数据字段和验收口径。同一种缺陷在不同产线被叫成不同名字,会让报表和模型训练失去可比性。把缺陷语言、复判流程和版本管理统一起来,视觉引导装配与定位才能从单点设备升级为可复制的质量能力。
十二、采购沟通要回到真实项目问题
很多采购、质量、工艺和设备团队评估视觉引导装配与定位时,并不是想看空泛宣传,而是在寻找能落地的答案。他们关心系统由什么组成,设备怎么选,样件怎么评估,误判怎么控制,数据怎么保存,能不能和 PLC、MES 或现有产线对接,验收时应该看哪些指标。因此,供应商和采购方沟通时应围绕真实项目问题展开,而不是只比较参数表。
采购文件中建议写清楚目标产品、缺陷类型、节拍、检测精度、接口、环境、追溯规则和验收方式。供应商回应时,也应明确当前能覆盖的范围、需要样件验证的范围、可能受限的条件和后续优化路径。越早把限制讲清楚,后续越容易形成信任。
工业视觉的长期价值来自真实、完整、可验证。无论是视觉引导装配与定位,还是更广泛的工业视觉检测、AI 视觉检测、质量追溯、边缘 AI 和产线自动化改造,最终都要回到现场生产闭环。能把样件、节拍、误判、追溯、维护和验收讲清楚的方案,才更适合长期合作。
十三、内部协同要覆盖采购、质量、工艺和设备
视觉引导装配与定位项目通常不是单一部门能独立完成的工作。采购部门关注预算、交期和供应商能力,质量部门关注缺陷标准、复判和客户审核,工艺部门关注材料、治具、节拍和参数窗口,设备部门关注安装、控制、维护和异常恢复。若这些角色没有在前期共同确认目标,项目后期就容易在验收标准上反复拉扯。
建议在立项阶段建立一份跨部门问题清单。质量团队说明哪些缺陷必须拦截,哪些属于边界样件;工艺团队说明哪些缺陷来自可调整工艺,哪些只能通过检测隔离;设备团队说明现场空间、PLC 点位、停机窗口和维护条件;采购团队则把这些要求转化为可比较的供应商响应。这样每个部门都能看到自己的责任,也能减少供应商被迫猜测需求。
跨部门协同还要延续到上线后。复判样本由谁确认,模型版本由谁批准,异常放行由谁负责,维护周期由谁执行,数据报表由谁查看,都应形成固定流程。只有责任边界清楚,视觉系统才不会在出现误判、停机或客户投诉时被临时归责,而是能进入正常质量管理节奏。
十四、分阶段部署比一次性大改更稳妥
对于多数企业来说,视觉引导装配与定位更适合分阶段推进。第一阶段可以做样件评估和离线验证,确认光学、算法和质量标准;第二阶段做旁路运行或影子模式,收集真实生产数据但不影响产线动作;第三阶段再接入报警、剔除、工艺动作或 MES 数据;第四阶段才扩展到多工位、多产品或多产线复制。
分阶段部署的好处,是每一步都能积累证据。离线验证证明缺陷可见,旁路运行证明现场稳定,联动验证证明动作可靠,数据对接证明追溯可用。若某一步不稳定,也能定位问题,而不是在完整上线后才发现光学、节拍、接口和数据同时有风险。
这种部署方式也更容易被现场接受。一线人员可以先看到系统如何判断,再逐步相信报警和剔除逻辑;质量工程师可以先复判样本,再决定缺陷标准是否需要调整;设备工程师可以先观察运行状态,再安排控制接入。工业视觉项目越贴近现场节奏,越不容易变成一次性演示。
十五、持续有效要看趋势,而不是只看上线当天
判断视觉引导装配与定位是否真正有效,不能只看上线当天的识别率。更有价值的是连续几周或几个月的趋势:误判是否下降,漏检投诉是否减少,复判样本是否被及时处理,设备报警是否稳定,维护后图像是否恢复一致,数据报表是否真的被质量会议使用。趋势能说明系统是否进入了日常管理。
如果一套系统上线后没有人复判样本、没有人查看报表、没有人维护光源和相机,也没有人管理模型版本,即使初期验收通过,长期效果也会下降。工业视觉设备不是装上就永远准确,它需要稳定的图像、清晰的标准、持续的样本和可执行的维护。把这些纳入日常机制,才能让投资持续产生价值。
最终,视觉引导装配与定位应成为制造现场的一部分,而不是孤立的技术设备。它要帮助企业更早发现风险、更快定位原因、更清楚地证明质量过程,并在产品、工艺和产线变化时保持可调整。能做到这一点的工业视觉系统,才真正从“检测设备”升级为“质量闭环节点”。
十六、把项目经验沉淀成可复制模板
当一个视觉引导装配与定位项目稳定运行后,企业不应只保留设备本身,还应把项目经验沉淀成模板。模板可以包含样件清单、缺陷命名、光学参数、配方字段、点位表、验收记录、维护周期、异常处理和培训材料。下一条产线或下一个产品导入时,团队就能基于已有模板评估差异,而不是从零开始重新沟通。
模板化并不等于把所有现场做成同一种方案。不同产品、材料、节拍和空间仍然需要重新验证,但稳定的方法可以复用。比如先做样件评估,再做旁路运行,再接入联动,再进入数据闭环;比如所有模型发布都要经过验证集回归;比如所有异常放行都要有权限和记录。这些原则越早固定,后续复制越顺畅。
长期看,企业真正积累的不是某台相机、某个算法或某次项目报价,而是一套能持续判断现场质量风险的工程能力。视觉引导装配与定位只是其中一个入口,它和工业相机、机器视觉光源、边缘 AI、PLC、MES、样本库、复判流程和维护制度共同组成质量体系。把经验留下来,才能让每一次视觉项目都比上一次更稳、更快、更可控。
在持续复制过程中,还要保留失败经验。哪些缺陷曾经误判,哪些现场条件导致光学漂移,哪些接口在调试中最容易出错,哪些维护项被忽略后影响稳定性,都应写入项目复盘。成功案例能帮助快速启动,失败记录能帮助团队避坑;两者合在一起,才会让工业视觉能力真正沉淀。