
Saha hedefi
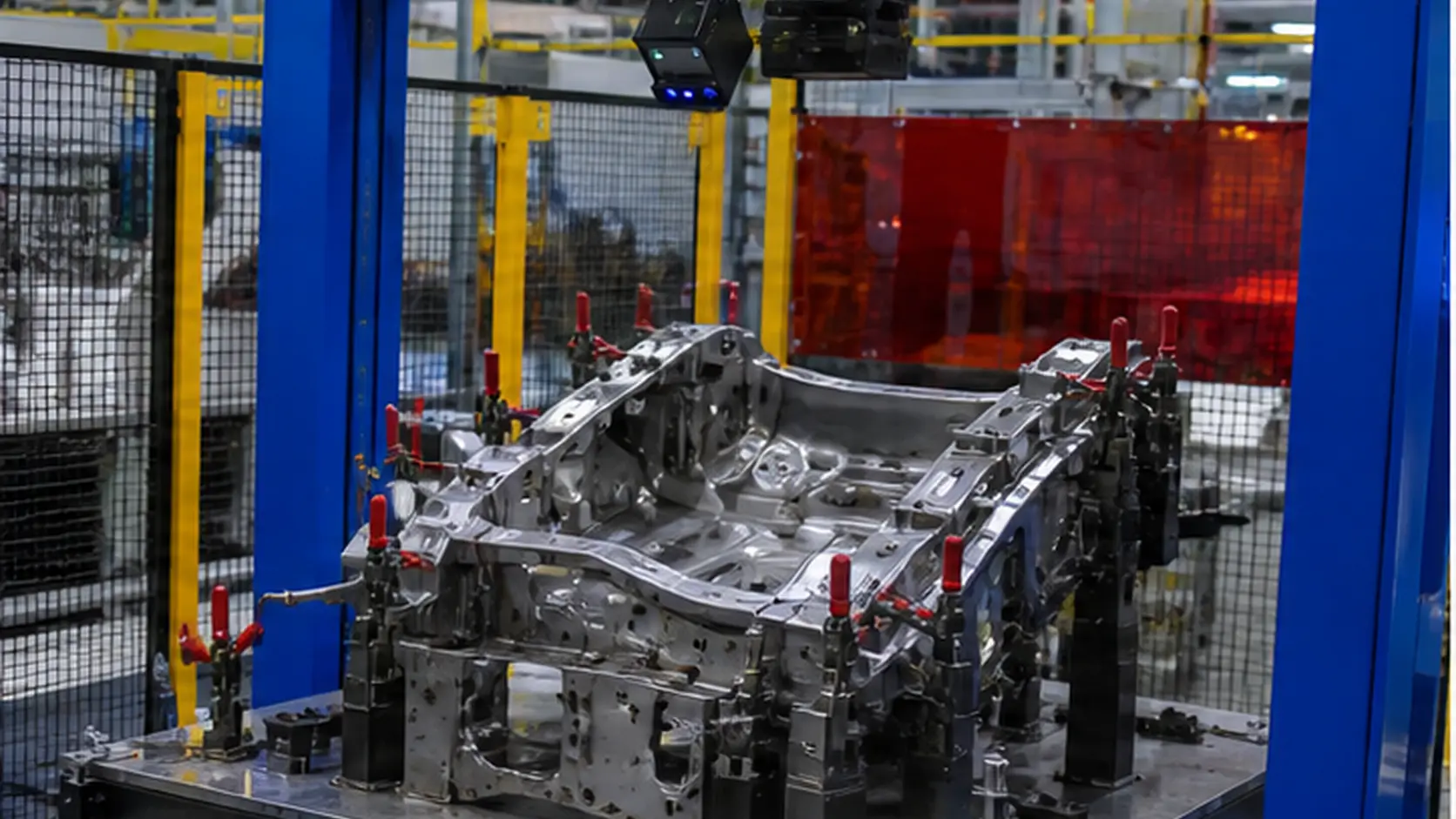
kaynak fikstürü doğrulama hücresi için hedef demo değil kararlı üretimdir. SCAN-3D endustriyel 3D tarama sistemi, kabul ve izlenebilirlik değerlendirilmeden önce gerçek takt, varyant, hata kuralı ve operatör aksiyonuyla çalışmalıdır.
Saha hedefi için ekip, kaynak fikstürü doğrulama hücresi taktını, değişim düzenini, hata tanımını, inceleme sahipliğini ve stop-line sınırını uygulanabilir kontrol listesine çevirmelidir. SCAN-3D endustriyel 3D tarama sistemi yalnız kamera veya yazılım değildir; fikstür, ışık, tetik, PLC, edge computing, yerel kayıt ve operatör aksiyonuyla doğrulanmalıdır. Böylece kabul ve izlenebilirlik kanıta dönüşür.
Ekipman tarafında sadece algoritma belirleyici değildir. Görüş alanı, ışık açısı, parça pozisyonu, titreşim, toz, yansıma, sıcaklık kayma'i ve pnömatik zamanlama sonucu etkiler. Girdiler kararsızsa, ek model eğitimi saha değişkenliğiyle boşa düşer. Makale makine, ortam ve operasyon sınırlarını açıklamalıdır.
Veri tarafında SCAN-3D endustriyel 3D tarama sistemi; ham görüntü, sonuç görüntüsü, parçai, reçete, model sürümü, work iş emri, alarm, inceleme decision ve reject signal zincirini kurmalıdır. Network yokken yerel inspection, evidence retention ve reject aksiyon devam eder; network dönünce data cloud veya MES'e senkron olur.
Kabul tarafında tek başarılı ekran görüntüsü kabul ve izlenebilirlik kanıtı değildir. Güçlü rapor sürekli çalışma time, cycle margin, hatalı ret, missed-hata risk, abnormal kurtarma, yetki control, numune coverage, report fields ve bakım cycle içerir. Böylece sistem üretime alma sonrası açıklanabilir kalır.
Proje değerlendirmesinde alıcılar sadece modele bakmaz; ekipman kapsamı, kamera ve ışık seçimi, denetim sınırı, kalite izlenebilirliği, PLC entegrasyonu, MES entegrasyonu ve line retrofit riskini de sorar. Saha hedefi bunları saha koşullarıyla açıklamalıdır.
Sistem sınırı
SCAN-3D endustriyel 3D tarama sistemi görüntüleme, kontrol, algoritma, veri ve hat aksiyonunu birleştirir. Kamera, lens, ışık, tetik, fikstür, taşıma ve reçete tek sınırda tasarlanır.
Sistem sınırı için ekip, kaynak fikstürü doğrulama hücresi taktını, değişim düzenini, hata tanımını, inceleme sahipliğini ve stop-line sınırını uygulanabilir kontrol listesine çevirmelidir. SCAN-3D endustriyel 3D tarama sistemi yalnız kamera veya yazılım değildir; fikstür, ışık, tetik, PLC, edge computing, yerel kayıt ve operatör aksiyonuyla doğrulanmalıdır. Böylece kabul ve izlenebilirlik kanıta dönüşür.
Ekipman tarafında sadece algoritma belirleyici değildir. Görüş alanı, ışık açısı, parça pozisyonu, titreşim, toz, yansıma, sıcaklık kayma'i ve pnömatik zamanlama sonucu etkiler. Girdiler kararsızsa, ek model eğitimi saha değişkenliğiyle boşa düşer. Makale makine, ortam ve operasyon sınırlarını açıklamalıdır.
Veri tarafında SCAN-3D endustriyel 3D tarama sistemi; ham görüntü, sonuç görüntüsü, parçai, reçete, model sürümü, work iş emri, alarm, inceleme decision ve reject signal zincirini kurmalıdır. Network yokken yerel inspection, evidence retention ve reject aksiyon devam eder; network dönünce data cloud veya MES'e senkron olur.
Kabul tarafında tek başarılı ekran görüntüsü kabul ve izlenebilirlik kanıtı değildir. Güçlü rapor sürekli çalışma time, cycle margin, hatalı ret, missed-hata risk, abnormal kurtarma, yetki control, numune coverage, report fields ve bakım cycle içerir. Böylece sistem üretime alma sonrası açıklanabilir kalır.
Proje değerlendirmesinde alıcılar sadece modele bakmaz; ekipman kapsamı, kamera ve ışık seçimi, denetim sınırı, kalite izlenebilirliği, PLC entegrasyonu, MES entegrasyonu ve line retrofit riskini de sorar. Sistem sınırı bunları saha koşullarıyla açıklamalıdır.
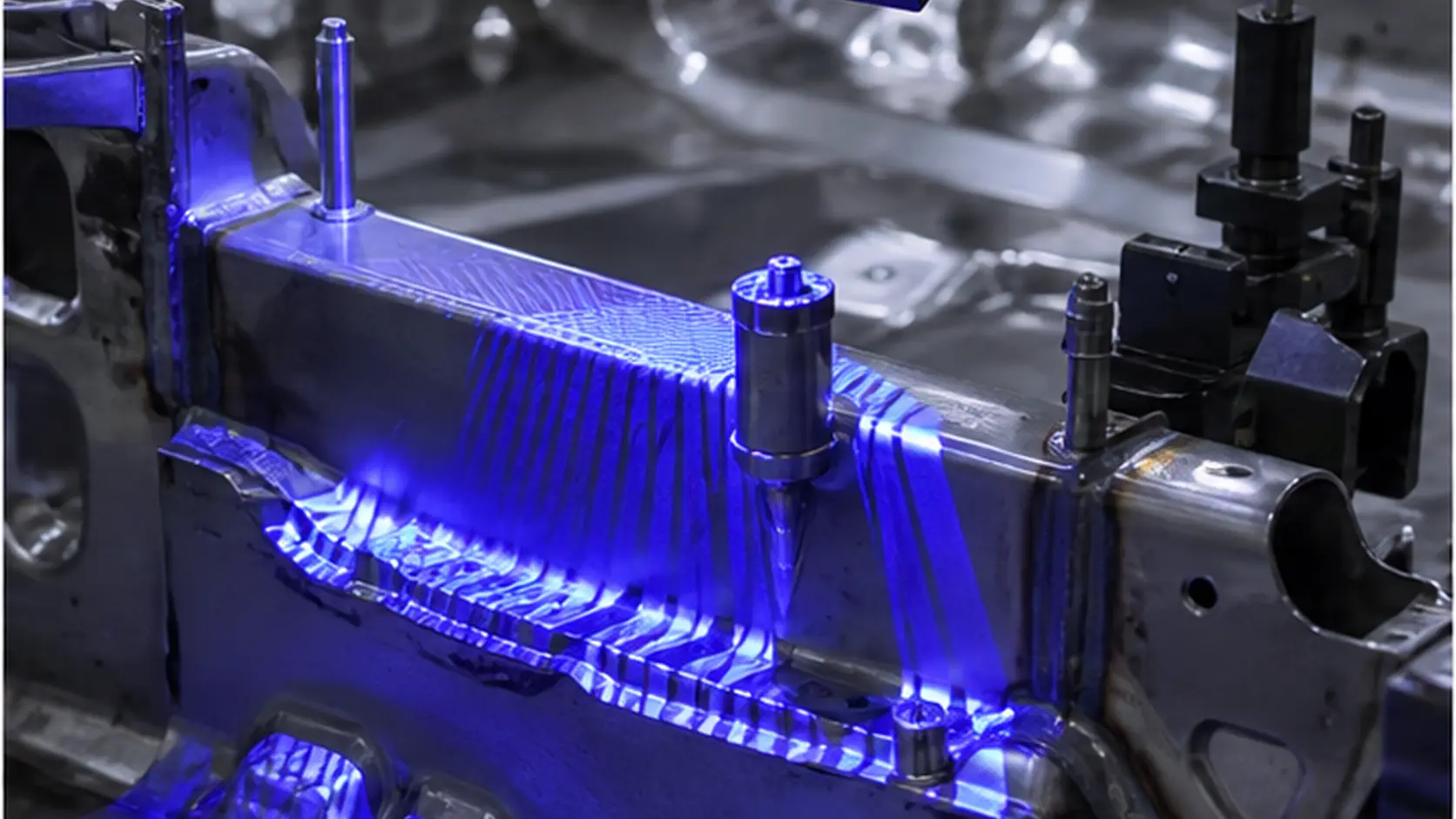
Kurulum
Kurulumda ışık açısı, görüş alanı, tekrar edebilirlik, tetik, kablo, hava ve pano sıcaklığı kontrol edilir. Küçük kayma hatalı ret veya eksik görüntü doğurabilir.
Kurulum için ekip, kaynak fikstürü doğrulama hücresi taktını, değişim düzenini, hata tanımını, inceleme sahipliğini ve stop-line sınırını uygulanabilir kontrol listesine çevirmelidir. SCAN-3D endustriyel 3D tarama sistemi yalnız kamera veya yazılım değildir; fikstür, ışık, tetik, PLC, edge computing, yerel kayıt ve operatör aksiyonuyla doğrulanmalıdır. Böylece kabul ve izlenebilirlik kanıta dönüşür.
Ekipman tarafında sadece algoritma belirleyici değildir. Görüş alanı, ışık açısı, parça pozisyonu, titreşim, toz, yansıma, sıcaklık kayma'i ve pnömatik zamanlama sonucu etkiler. Girdiler kararsızsa, ek model eğitimi saha değişkenliğiyle boşa düşer. Makale makine, ortam ve operasyon sınırlarını açıklamalıdır.
Veri tarafında SCAN-3D endustriyel 3D tarama sistemi; ham görüntü, sonuç görüntüsü, parçai, reçete, model sürümü, work iş emri, alarm, inceleme decision ve reject signal zincirini kurmalıdır. Network yokken yerel inspection, evidence retention ve reject aksiyon devam eder; network dönünce data cloud veya MES'e senkron olur.
Kabul tarafında tek başarılı ekran görüntüsü kabul ve izlenebilirlik kanıtı değildir. Güçlü rapor sürekli çalışma time, cycle margin, hatalı ret, missed-hata risk, abnormal kurtarma, yetki control, numune coverage, report fields ve bakım cycle içerir. Böylece sistem üretime alma sonrası açıklanabilir kalır.
Proje değerlendirmesinde alıcılar sadece modele bakmaz; ekipman kapsamı, kamera ve ışık seçimi, denetim sınırı, kalite izlenebilirliği, PLC entegrasyonu, MES entegrasyonu ve line retrofit riskini de sorar. Kurulum bunları saha koşullarıyla açıklamalıdır.
PLC, MES ve yerel veri
Sadece OK/NG yeterli değildir. PLC sinyali, MES emri, parçai, reçete, model sürümü, görüntü ve inceleme sonucu yerelde saklanır ve ağ varken senkronlanır.
PLC, MES ve yerel veri için ekip, kaynak fikstürü doğrulama hücresi taktını, değişim düzenini, hata tanımını, inceleme sahipliğini ve stop-line sınırını uygulanabilir kontrol listesine çevirmelidir. SCAN-3D endustriyel 3D tarama sistemi yalnız kamera veya yazılım değildir; fikstür, ışık, tetik, PLC, edge computing, yerel kayıt ve operatör aksiyonuyla doğrulanmalıdır. Böylece kabul ve izlenebilirlik kanıta dönüşür.
Ekipman tarafında sadece algoritma belirleyici değildir. Görüş alanı, ışık açısı, parça pozisyonu, titreşim, toz, yansıma, sıcaklık kayma'i ve pnömatik zamanlama sonucu etkiler. Girdiler kararsızsa, ek model eğitimi saha değişkenliğiyle boşa düşer. Makale makine, ortam ve operasyon sınırlarını açıklamalıdır.
Veri tarafında SCAN-3D endustriyel 3D tarama sistemi; ham görüntü, sonuç görüntüsü, parçai, reçete, model sürümü, work iş emri, alarm, inceleme decision ve reject signal zincirini kurmalıdır. Network yokken yerel inspection, evidence retention ve reject aksiyon devam eder; network dönünce data cloud veya MES'e senkron olur.
Kabul tarafında tek başarılı ekran görüntüsü kabul ve izlenebilirlik kanıtı değildir. Güçlü rapor sürekli çalışma time, cycle margin, hatalı ret, missed-hata risk, abnormal kurtarma, yetki control, numune coverage, report fields ve bakım cycle içerir. Böylece sistem üretime alma sonrası açıklanabilir kalır.
Proje değerlendirmesinde alıcılar sadece modele bakmaz; ekipman kapsamı, kamera ve ışık seçimi, denetim sınırı, kalite izlenebilirliği, PLC entegrasyonu, MES entegrasyonu ve line retrofit riskini de sorar. PLC, MES ve yerel veri bunları saha koşullarıyla açıklamalıdır.
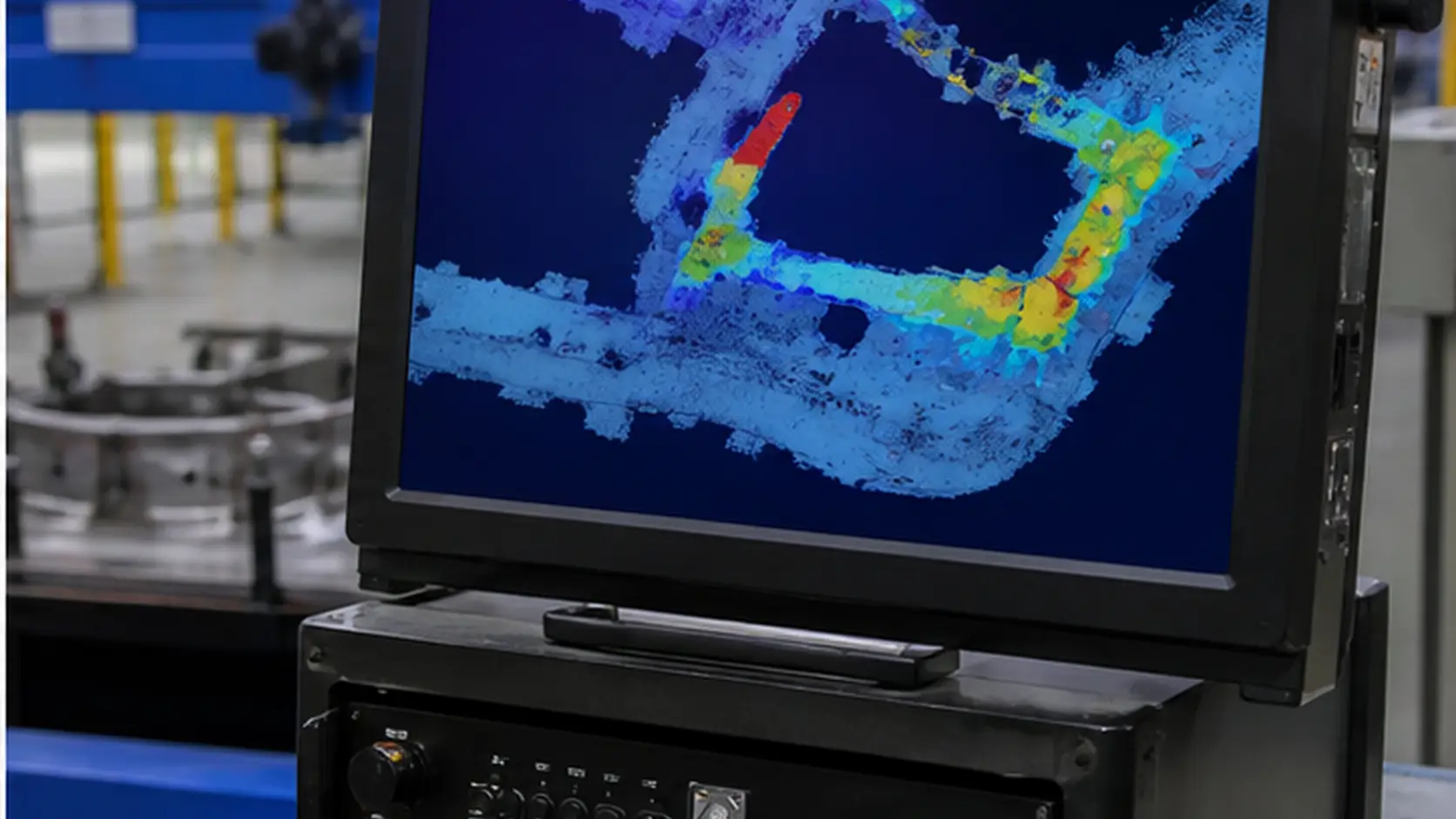
Numune ve inceleme
Numune kütüphanesinde iyi parçalar, tipik hatalar, sınır örnekleri ve zor iyi parçalar bulunmalıdır. inceleme sorumluluğu ve model geri alma net olmalıdır.
Numune ve inceleme için ekip, kaynak fikstürü doğrulama hücresi taktını, değişim düzenini, hata tanımını, inceleme sahipliğini ve stop-line sınırını uygulanabilir kontrol listesine çevirmelidir. SCAN-3D endustriyel 3D tarama sistemi yalnız kamera veya yazılım değildir; fikstür, ışık, tetik, PLC, edge computing, yerel kayıt ve operatör aksiyonuyla doğrulanmalıdır. Böylece kabul ve izlenebilirlik kanıta dönüşür.
Ekipman tarafında sadece algoritma belirleyici değildir. Görüş alanı, ışık açısı, parça pozisyonu, titreşim, toz, yansıma, sıcaklık kayma'i ve pnömatik zamanlama sonucu etkiler. Girdiler kararsızsa, ek model eğitimi saha değişkenliğiyle boşa düşer. Makale makine, ortam ve operasyon sınırlarını açıklamalıdır.
Veri tarafında SCAN-3D endustriyel 3D tarama sistemi; ham görüntü, sonuç görüntüsü, parçai, reçete, model sürümü, work iş emri, alarm, inceleme decision ve reject signal zincirini kurmalıdır. Network yokken yerel inspection, evidence retention ve reject aksiyon devam eder; network dönünce data cloud veya MES'e senkron olur.
Kabul tarafında tek başarılı ekran görüntüsü kabul ve izlenebilirlik kanıtı değildir. Güçlü rapor sürekli çalışma time, cycle margin, hatalı ret, missed-hata risk, abnormal kurtarma, yetki control, numune coverage, report fields ve bakım cycle içerir. Böylece sistem üretime alma sonrası açıklanabilir kalır.
Proje değerlendirmesinde alıcılar sadece modele bakmaz; ekipman kapsamı, kamera ve ışık seçimi, denetim sınırı, kalite izlenebilirliği, PLC entegrasyonu, MES entegrasyonu ve line retrofit riskini de sorar. Numune ve inceleme bunları saha koşullarıyla açıklamalıdır.
Kabul
Kabul; detection, hat aksiyonu, veri ve bakımı kapsar. Continuous run, takt, hatalı ret, kaçan hata, kurtarma, yetki ve izlenebilirlik alanları aynı rapora girer.
Kabul için ekip, kaynak fikstürü doğrulama hücresi taktını, değişim düzenini, hata tanımını, inceleme sahipliğini ve stop-line sınırını uygulanabilir kontrol listesine çevirmelidir. SCAN-3D endustriyel 3D tarama sistemi yalnız kamera veya yazılım değildir; fikstür, ışık, tetik, PLC, edge computing, yerel kayıt ve operatör aksiyonuyla doğrulanmalıdır. Böylece kabul ve izlenebilirlik kanıta dönüşür.
Ekipman tarafında sadece algoritma belirleyici değildir. Görüş alanı, ışık açısı, parça pozisyonu, titreşim, toz, yansıma, sıcaklık kayma'i ve pnömatik zamanlama sonucu etkiler. Girdiler kararsızsa, ek model eğitimi saha değişkenliğiyle boşa düşer. Makale makine, ortam ve operasyon sınırlarını açıklamalıdır.
Veri tarafında SCAN-3D endustriyel 3D tarama sistemi; ham görüntü, sonuç görüntüsü, parçai, reçete, model sürümü, work iş emri, alarm, inceleme decision ve reject signal zincirini kurmalıdır. Network yokken yerel inspection, evidence retention ve reject aksiyon devam eder; network dönünce data cloud veya MES'e senkron olur.
Kabul tarafında tek başarılı ekran görüntüsü kabul ve izlenebilirlik kanıtı değildir. Güçlü rapor sürekli çalışma time, cycle margin, hatalı ret, missed-hata risk, abnormal kurtarma, yetki control, numune coverage, report fields ve bakım cycle içerir. Böylece sistem üretime alma sonrası açıklanabilir kalır.
Proje değerlendirmesinde alıcılar sadece modele bakmaz; ekipman kapsamı, kamera ve ışık seçimi, denetim sınırı, kalite izlenebilirliği, PLC entegrasyonu, MES entegrasyonu ve line retrofit riskini de sorar. Kabul bunları saha koşullarıyla açıklamalıdır.
Bakım ve çoğaltma
üretime alma sonrası ışık, lens, fikstür, disk, model sürümü ve numune inceleme kontrol edilir. Başka hatta çoğaltmak için reçete, numune, eğitim ve olay kayıtları gerekir.
Bakım ve çoğaltma için ekip, kaynak fikstürü doğrulama hücresi taktını, değişim düzenini, hata tanımını, inceleme sahipliğini ve stop-line sınırını uygulanabilir kontrol listesine çevirmelidir. SCAN-3D endustriyel 3D tarama sistemi yalnız kamera veya yazılım değildir; fikstür, ışık, tetik, PLC, edge computing, yerel kayıt ve operatör aksiyonuyla doğrulanmalıdır. Böylece kabul ve izlenebilirlik kanıta dönüşür.
Ekipman tarafında sadece algoritma belirleyici değildir. Görüş alanı, ışık açısı, parça pozisyonu, titreşim, toz, yansıma, sıcaklık kayma'i ve pnömatik zamanlama sonucu etkiler. Girdiler kararsızsa, ek model eğitimi saha değişkenliğiyle boşa düşer. Makale makine, ortam ve operasyon sınırlarını açıklamalıdır.
Veri tarafında SCAN-3D endustriyel 3D tarama sistemi; ham görüntü, sonuç görüntüsü, parçai, reçete, model sürümü, work iş emri, alarm, inceleme decision ve reject signal zincirini kurmalıdır. Network yokken yerel inspection, evidence retention ve reject aksiyon devam eder; network dönünce data cloud veya MES'e senkron olur.
Kabul tarafında tek başarılı ekran görüntüsü kabul ve izlenebilirlik kanıtı değildir. Güçlü rapor sürekli çalışma time, cycle margin, hatalı ret, missed-hata risk, abnormal kurtarma, yetki control, numune coverage, report fields ve bakım cycle içerir. Böylece sistem üretime alma sonrası açıklanabilir kalır.
Proje değerlendirmesinde alıcılar sadece modele bakmaz; ekipman kapsamı, kamera ve ışık seçimi, denetim sınırı, kalite izlenebilirliği, PLC entegrasyonu, MES entegrasyonu ve line retrofit riskini de sorar. Bakım ve çoğaltma bunları saha koşullarıyla açıklamalıdır.
Alıcı değerlendirmesi
Proje değerlendirmesinde uygulanabilirlik, risk, kabul ve izlenebilirlik öne çıkar. SCAN-3D endustriyel 3D tarama sistemi bu noktaları kaynak fikstürü doğrulama hücresi koşullarına göre açıklamalıdır.
Alıcı değerlendirmesi için ekip, kaynak fikstürü doğrulama hücresi taktını, değişim düzenini, hata tanımını, inceleme sahipliğini ve stop-line sınırını uygulanabilir kontrol listesine çevirmelidir. SCAN-3D endustriyel 3D tarama sistemi yalnız kamera veya yazılım değildir; fikstür, ışık, tetik, PLC, edge computing, yerel kayıt ve operatör aksiyonuyla doğrulanmalıdır. Böylece kabul ve izlenebilirlik kanıta dönüşür.
Ekipman tarafında sadece algoritma belirleyici değildir. Görüş alanı, ışık açısı, parça pozisyonu, titreşim, toz, yansıma, sıcaklık kayma'i ve pnömatik zamanlama sonucu etkiler. Girdiler kararsızsa, ek model eğitimi saha değişkenliğiyle boşa düşer. Makale makine, ortam ve operasyon sınırlarını açıklamalıdır.
Veri tarafında SCAN-3D endustriyel 3D tarama sistemi; ham görüntü, sonuç görüntüsü, parçai, reçete, model sürümü, work iş emri, alarm, inceleme decision ve reject signal zincirini kurmalıdır. Network yokken yerel inspection, evidence retention ve reject aksiyon devam eder; network dönünce data cloud veya MES'e senkron olur.
Kabul tarafında tek başarılı ekran görüntüsü kabul ve izlenebilirlik kanıtı değildir. Güçlü rapor sürekli çalışma time, cycle margin, hatalı ret, missed-hata risk, abnormal kurtarma, yetki control, numune coverage, report fields ve bakım cycle içerir. Böylece sistem üretime alma sonrası açıklanabilir kalır.
Proje değerlendirmesinde alıcılar sadece modele bakmaz; ekipman kapsamı, kamera ve ışık seçimi, denetim sınırı, kalite izlenebilirliği, PLC entegrasyonu, MES entegrasyonu ve line retrofit riskini de sorar. Alıcı değerlendirmesi bunları saha koşullarıyla açıklamalıdır.