

Mengapa lokasi membutuhkan solusi ini
lini verifikasi vision setelah penandaan laser sudah memiliki takt, dudukan, dan aturan kualitas. Sebelum menilai Solusi verifikasi vision dan pemeriksaan posisi setelah penandaan laser, tim menentukan cacat pemblokir, kasus peninjauan, dan data per batch.

Data menjelaskan setiap keputusan: gambar, resep, versi model, pemicu, peninjauaner, dan aksi.
Stabilitas produksi utama. resep, model, sampel, dan pengecualian perlu riwayat.
Objek inspeksi dan batas citra
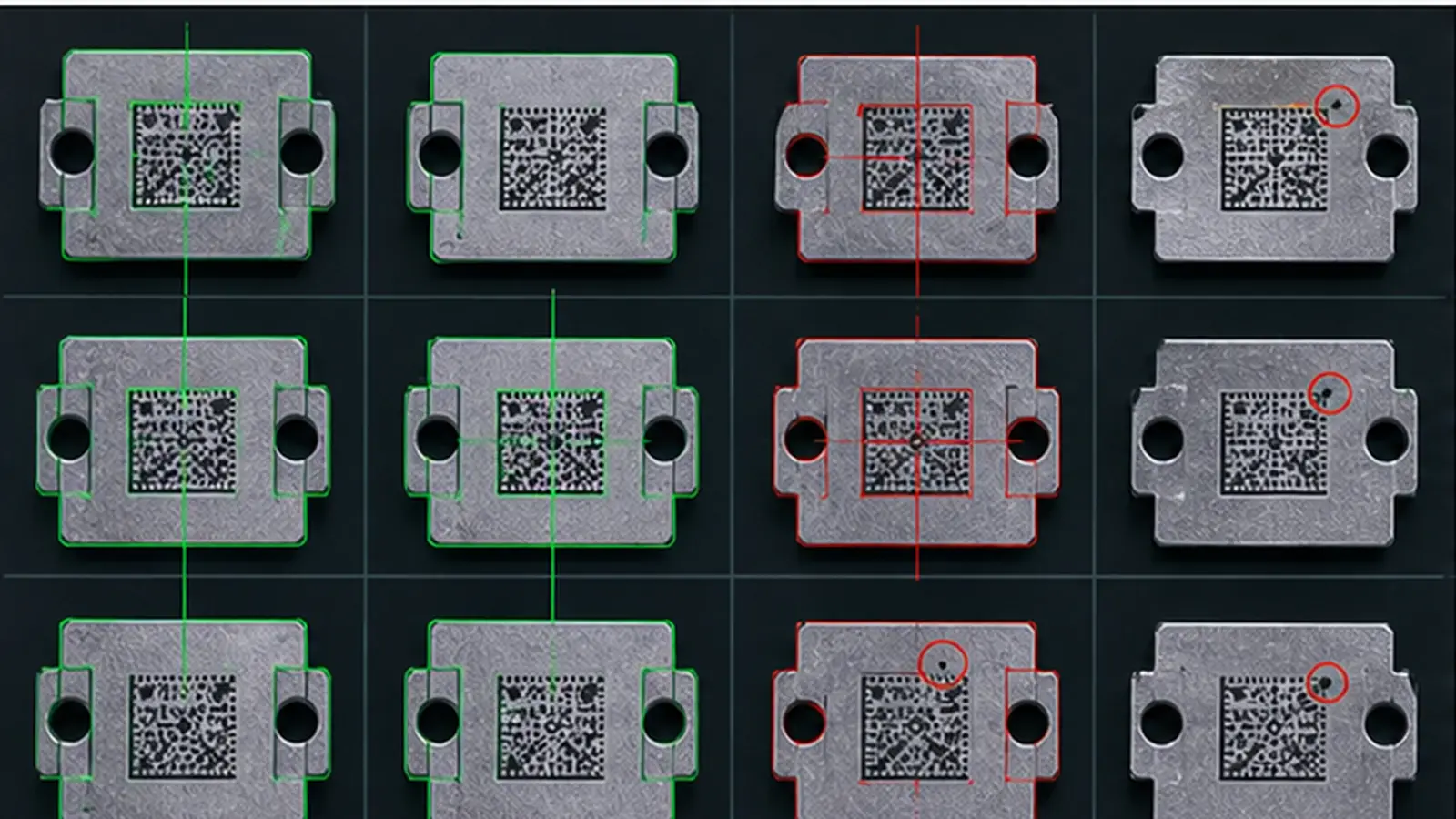
Solusi verifikasi vision dan pemeriksaan posisi setelah penandaan laser dipengaruhi material, pantulan, transparansi, pose komponen, dan variasi masuk. bidang pandang, lensaa, cahaya, eksposur, pemicu, dan keterulangan dirancang bersama.
Stabilitas produksi utama. resep, model, sampel, dan pengecualian perlu riwayat.

Retrofit memperhatikan ruang, kabel, panas panel, keselamatan, reject, dan stop logic.
Optik, mekanik, dan takt
Stabilitas diuji pada kecepatan nyata: konveyor, posisi, pembacaan kode, umur lampu, dudukan kamera, getaran, dan cahaya sekitar.
Retrofit memperhatikan ruang, kabel, panas panel, keselamatan, reject, dan stop logic.
Perawatan memantau cahaya, lensaa, dudukan, kamera, disk, pergeseran sampel, dan izin.
Algoritme mengikuti standar proses
model dan ambang harus mengikuti standar proses. Sampel batas, tolak salah, risiko miss, dan rilis resep membutuhkan aturan jelas.
Perawatan memantau cahaya, lensaa, dudukan, kamera, disk, pergeseran sampel, dan izin.
Batasan lokasi sering lebih penting dari kompleksitas algoritme; proses, peralatan, kualitas, dan IT meninjau bersama.
Integrasi lini dan catatan lokal
lini verifikasi vision setelah penandaan laser butuh lebih dari OK/NG. Order, batch, resep, gambar, hasil, peninjauan, dan pengecualian disimpan lokal.
Batasan lokasi sering lebih penting dari kompleksitas algoritme; proses, peralatan, kualitas, dan IT meninjau bersama.
Kualitas citra bukan hanya tajam. Refleksi, transparansi, goresan halus, dan pengukuran memerlukan optik berbeda.
Pustaka sampel dan pengecualian
Pustaka sampel menjaga Solusi verifikasi vision dan pemeriksaan posisi setelah penandaan laser stabil, berisi komponen baik, cacat umum, sampel batas, dan komponen baik yang mudah salah ditolak.
Kualitas citra bukan hanya tajam. Refleksi, transparansi, goresan halus, dan pengukuran memerlukan optik berbeda.
Data menjelaskan setiap keputusan: gambar, resep, versi model, pemicu, peninjauaner, dan aksi.
Penerimaan, pelatihan, dan perawatan
Penerimaan mencakup jalan kontinu, kecepatan, ganti tipe, pemulihan, izin, ekspor, retensi gambar, dan serah terima perawatan.
Data menjelaskan setiap keputusan: gambar, resep, versi model, pemicu, peninjauaner, dan aksi.
Stabilitas produksi utama. resep, model, sampel, dan pengecualian perlu riwayat.
Hal yang dicek sebelum replikasi
Saat diterapkan pada lini verifikasi vision setelah penandaan laser lain, cek ulang ruang, komponen masuk, dudukan, margin takt, dan antarmuka data.
Stabilitas produksi utama. resep, model, sampel, dan pengecualian perlu riwayat.
Retrofit memperhatikan ruang, kabel, panas panel, keselamatan, reject, dan stop logic.